

Vehicular virtual terminal system based on dynamic map interface
A dynamic map and virtual terminal technology, applied in the field of vehicle virtual terminal systems, can solve the problems of wireless access technology heterogeneity and heterogeneous terminals, and achieve the effect of increasing user experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The operation mode of the vehicle-mounted virtual terminal system based on the dynamic map interface is described in detail below:
[0036] 1. Design concept and purpose of vehicle virtual terminal system based on dynamic map interface
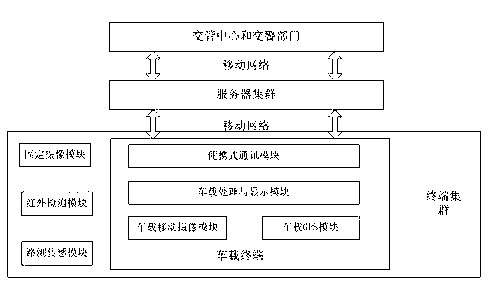
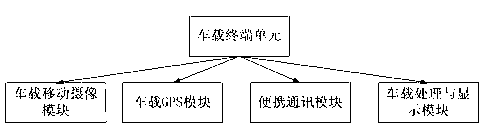
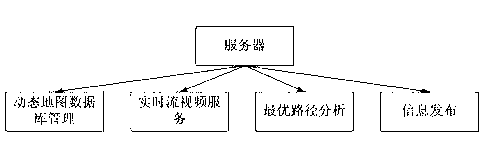
[0037] This system provides a customizable virtual terminal for different users of the vehicle network, so that the vehicle terminal can provide corresponding services according to the business type required by the user.
[0038] The in-vehicle virtual terminal provides four different services. They serve ordinary vehicles, dangerous goods vehicles, police vehicles and supervision vehicles respectively. The definitions and service contents of the four types of vehicles are as follows:
[0039] (1) Ordinary vehicles: including taxis, ambulances, private cars and other general vehicles; (2) Dangerous goods vehicles (such as muck trucks): vehicles for transporting dangerous goods or waste; (3) Police vehicles: law enforcement, forensics an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More