

Mobile robot path planning method used in intensive storage zone
A mobile robot and path planning technology, applied in the field of mobile robots, can solve problems such as inability to consume time and space, and insufficient response to environmental information, and achieve the effects of reducing complexity, improving real-time performance and effectiveness, and reducing time and space consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The following describes the embodiments of the present invention in further detail with reference to the accompanying drawings:
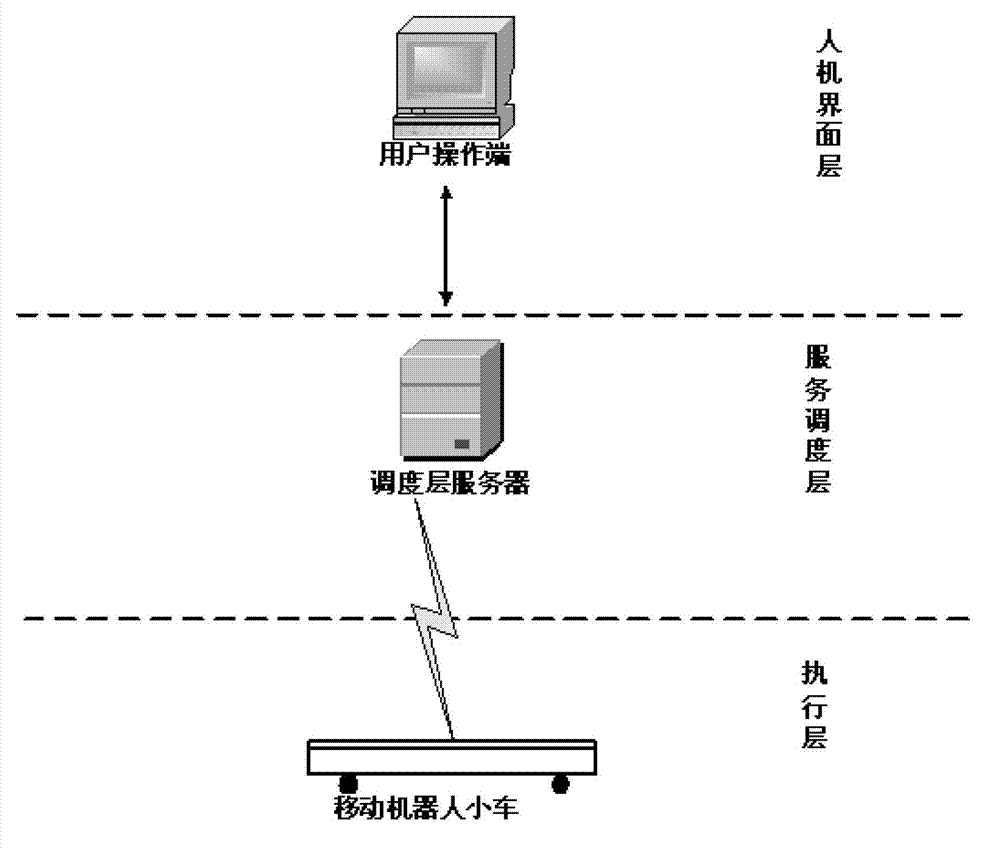
[0049] A path planning method for mobile robots in dense storage areas, such as figure 1 As shown, it is implemented on a three-tier structure control system. The control system includes a human-machine interface layer, a service scheduling layer, and an execution layer. The human-machine interface layer uses user operation terminals to realize the function of storing and storing goods, and the execution layer uses mobile The robot completes the task of storing and storing goods, and the service dispatch layer uses the dispatch layer server to communicate with the user operation terminal and the mobile robot, and realizes the path planning method to control the mobile robot to perform the operation of storing and storing goods. The human-machine interface layer requests the service scheduling layer to access goods, and the service scheduling laye...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More