

Method for dynamically monitoring power cable in real time by three-synchronization underwater robot
A technology of underwater robot and power cable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the present invention more comprehensible, preferred embodiments are described in detail below with accompanying drawings.
[0025] The invention provides a method for dynamic and real-time monitoring of a power cable by a three-synchronous underwater robot, the steps of which are as follows:
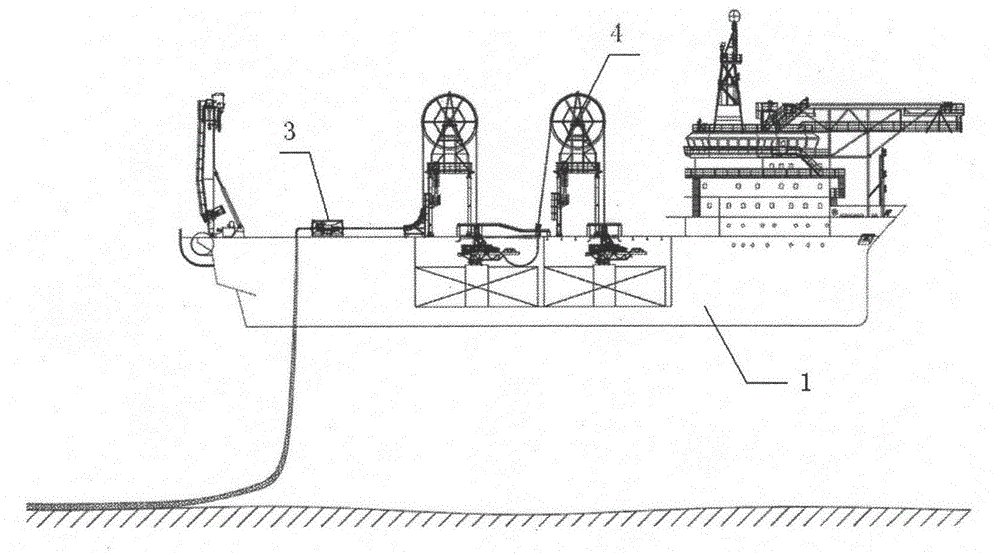
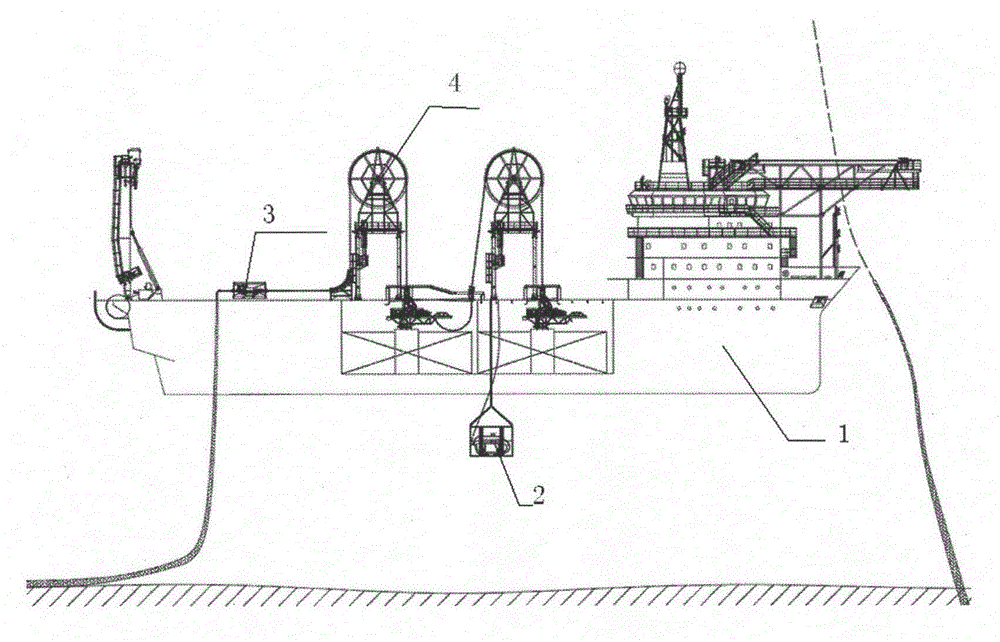
[0026] first step, combine figure 1 , the offshore platform is ready, the power cable end on the cable construction ship 1 is ready to pull the head, install the shackle, swivel joint and other connections, pay attention to all sharp edges need to be wrapped with tape for protection, and then pull the power cable to the platform After being temporarily fixed, the cable construction ship 1 starts to lay the power cable through the control of the cable laying machine 3 and the double active power turntable 4, with a speed of 0.3-0.5 km / h and a maximum target speed of 1.0 km / h. At the same time, pay attention to the adjustment of the power cable The laying margin t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More