

Robot single-leg assembly control development performance test platform and method
A technology for controlling development and testing platforms, applied in electrical testing/monitoring, etc., can solve problems such as not being able to directly describe robots, and not being able to test with a single leg of a robot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
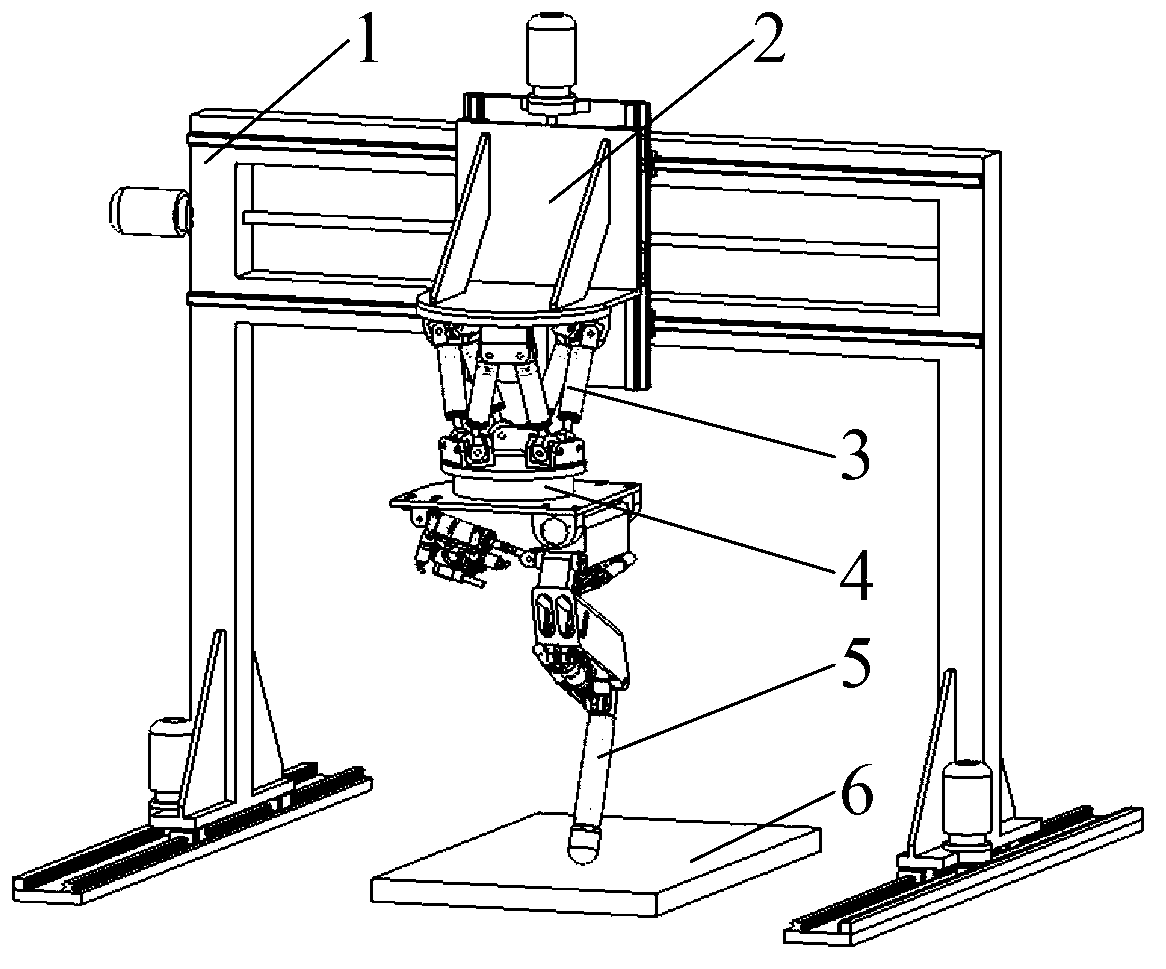
[0036] A robot single-leg assembly control development performance test platform includes a door-type three-coordinate manipulator assembly 1, a robot leg connection bracket 2, a Stewart platform 3 (internal integrated servo drive, displacement sensor), a six-dimensional force Sensor 4, a robot single-leg assembly 5, and a five-dimensional force measuring platform 6.
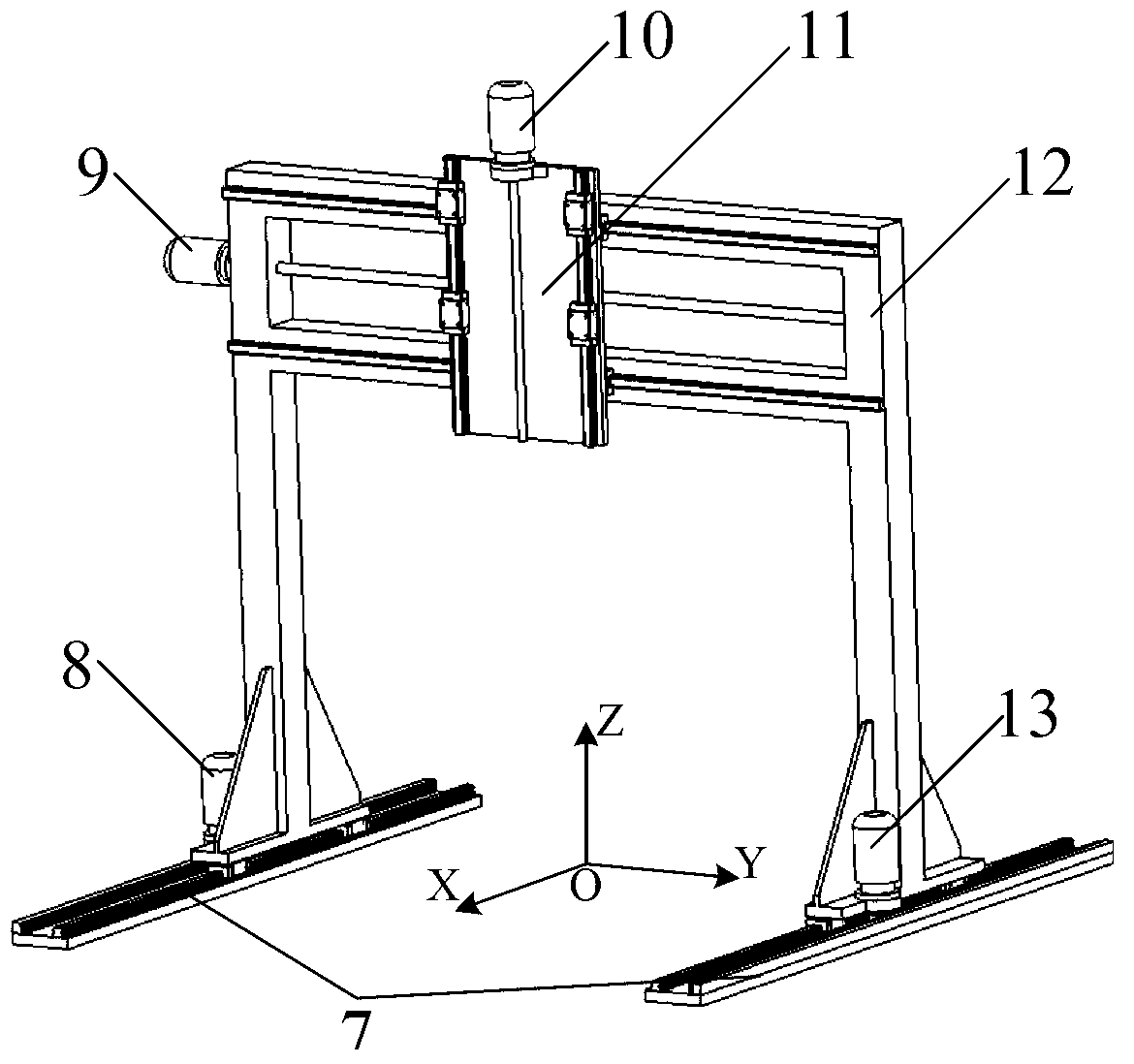
[0037] The portal-type three-coordinate manipulator assembly 1 includes a moving support frame assembly 7 in the X-axis direction, a moving support frame assembly 12 in the Y-axis direction, a moving support frame assembly 11 in the Z-axis direction, and a first servo motor 8 (self-contained connecting flange, internally integrated encoder), the second servo motor 9 (self-contained connecting flange, internally integrated encoder), third servo motor 10 (self-contained connecting flange, i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More