

Guide method for SD type automated guided vehicle (AGV) system under laser guidance
A laser-guided and laser-guided technology, applied in general control systems, control/adjustment systems, two-dimensional position/channel control, etc., can solve problems such as long processing cycles, high requirements for processor computing power, and complex operations , to achieve the effect of reducing computing performance requirements, shortening the processing cycle, and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The following are specific embodiments of the present invention and in conjunction with the accompanying drawings, the technical solutions of the present invention are further described, but the present invention is not limited to these embodiments.
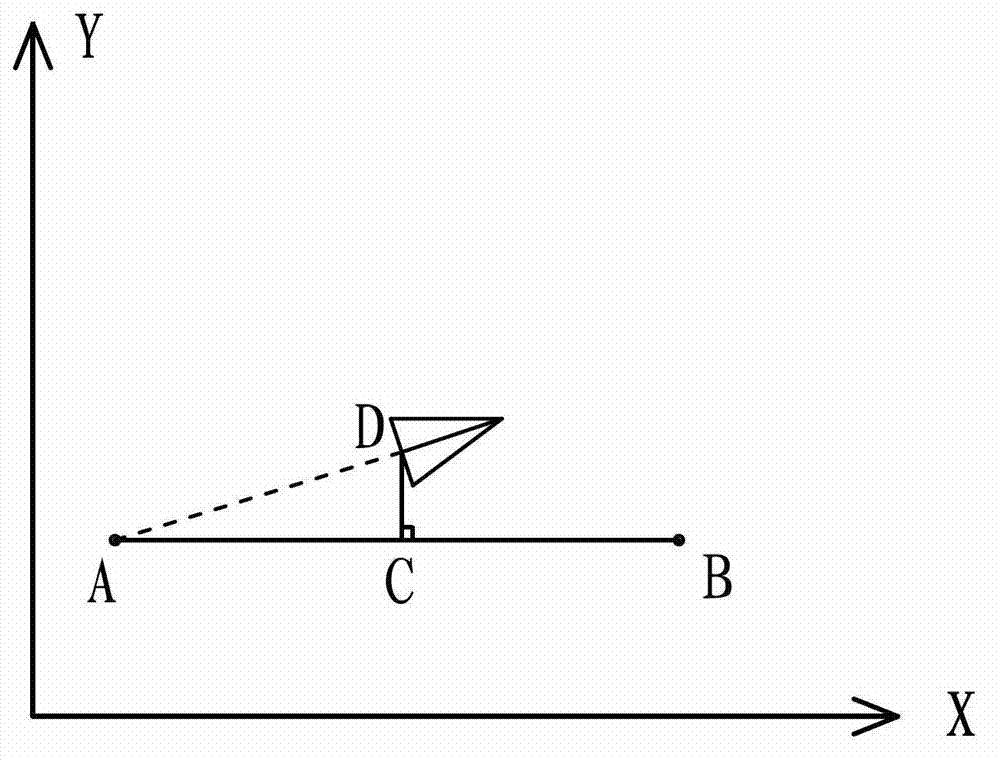
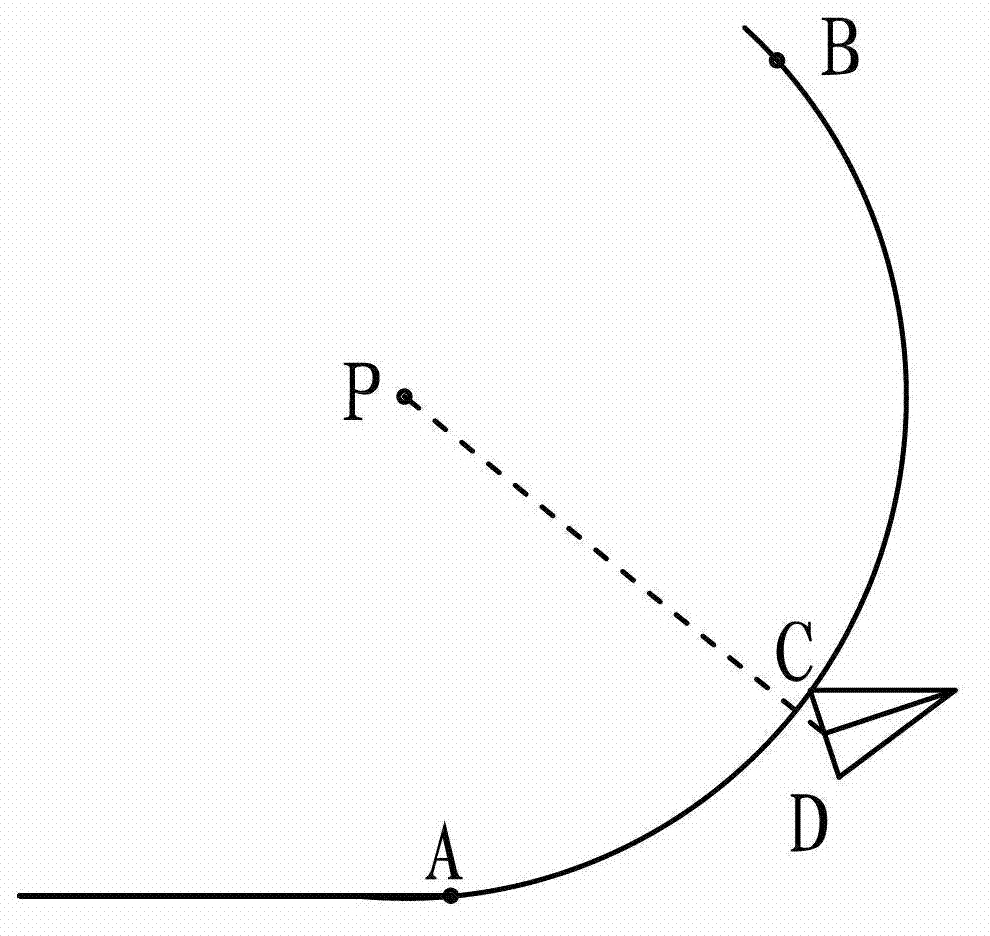
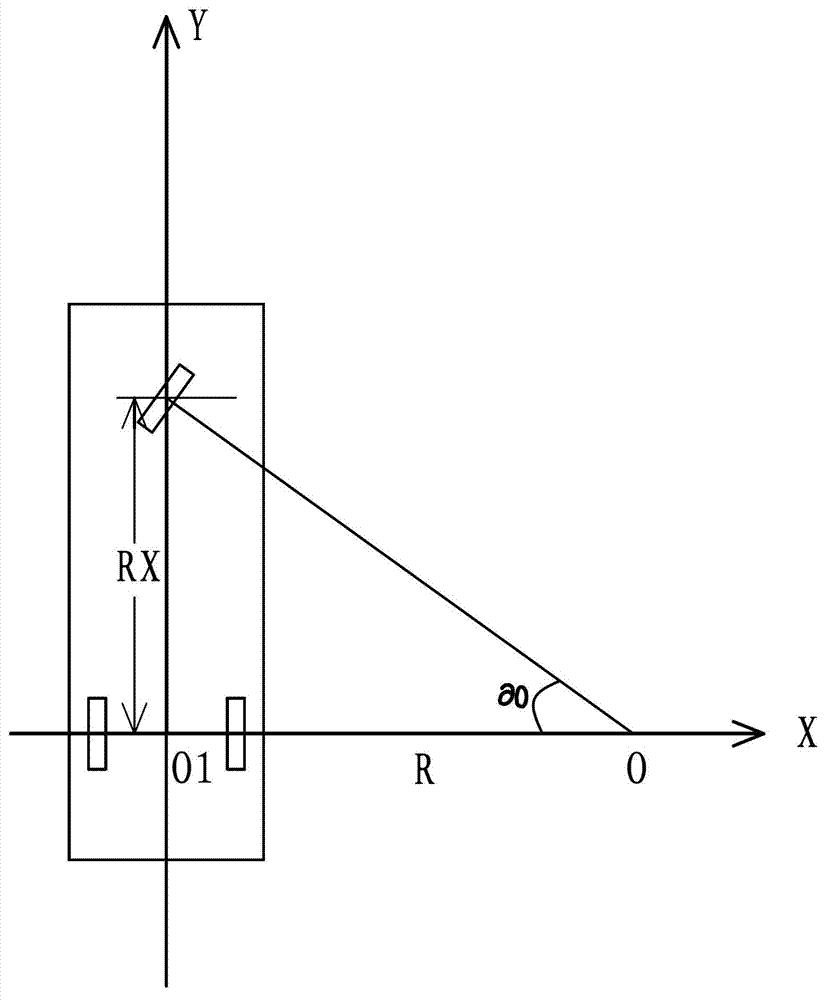
[0034] Such as figure 1 , 2 , 3 and 6, this method is aimed at the AGV system with laser-guided SD-type drive structure. The AGV with SD-type drive structure is a drive structure that uses the driving wheel with steering function and cooperates with two driven wheels. The trajectory of the AGV is only related to the front wheel angle, so as long as the front wheel angle is controlled, the trajectory tracking control of the AGV can be realized. The control value obtained through the calculation is the control value of the rotation angle of the front wheel of the AGV. Using this control value to adjust the front wheel in real time, the AGV can be controlled to automatically drive along the set path.
[0035] The guidance m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More