

Covering method of map self-established by mobile platform in unknown region
A mobile platform and unknown area technology, applied in the coverage field of the mobile platform's self-built maps in unknown areas, can solve the problems of low coverage rate and complex algorithm, and achieve the effect of simple algorithm and improved coverage efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
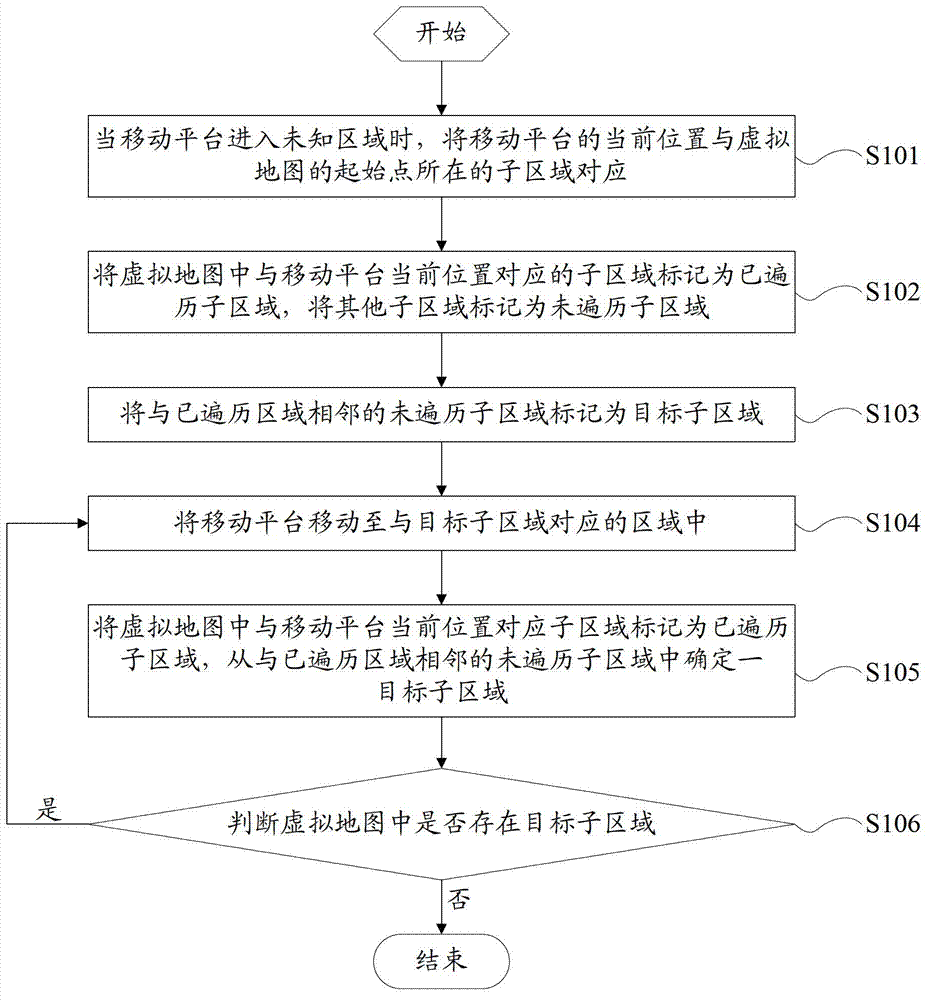
[0053] Embodiment 1 of the present invention provides a coverage method for a mobile platform to build a map in an unknown area in advance. A virtual map with a starting point as the center and including multiple sub-areas is pre-established. figure 1 As a schematic flowchart of the method, the method may include:
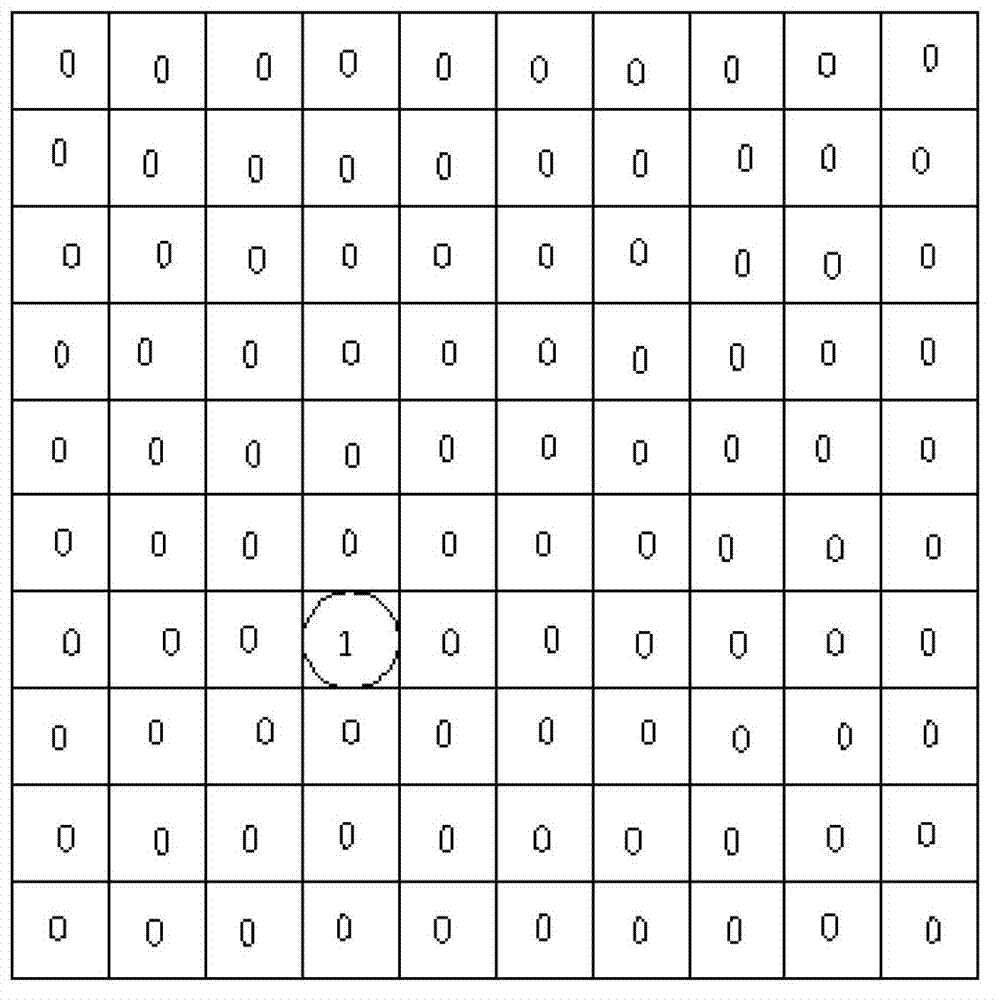
[0054] S101: When the mobile platform enters the unknown area, the current position of the mobile platform corresponds to the sub-area where the starting point of the map storage system is located.
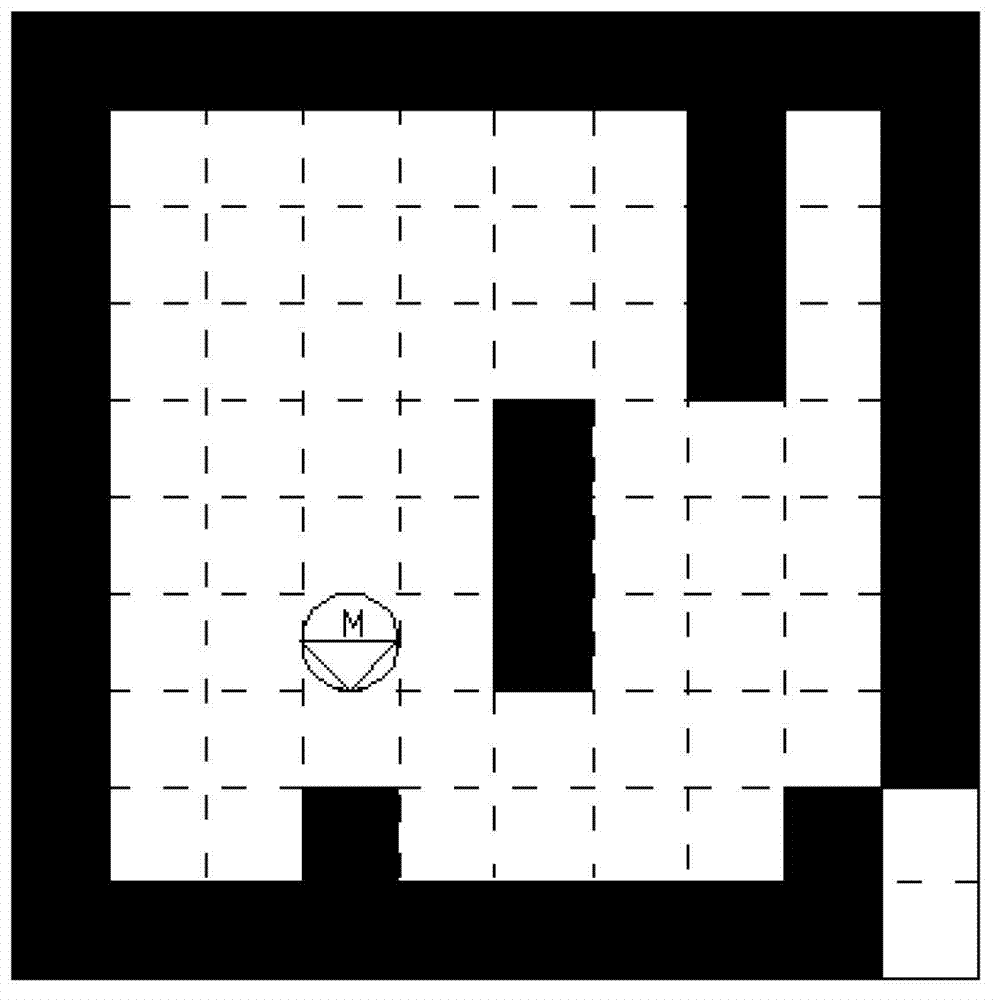
[0055] figure 2 This is a schematic diagram of the mobile platform M in the unknown area in this embodiment, wherein the dotted line marks are to facilitate the technicians to understand the division of the actual area and correspond to the sub-areas in the virtual map, that is, the mobile platform M is in the actual unknown area. Each location in has a corresponding sub-area in the virtual map. in, figure 2 The black areas in the box indicate obstacles or boundar...
Embodiment 2
[0069] The second embodiment of the present invention provides a covering method for a mobile platform to build a map in an unknown area. figure 1 . Different from the first embodiment, in the first embodiment, as figure 2 As shown, the size of the sub-area in the virtual map is basically the same as the size of the mobile platform in the virtual map, and in the second embodiment, as Figure 12 As shown, the size of the sub-region in the virtual map is about 1 / 2 of the size of the mobile platform in the virtual map.
[0070] In the following description of the specific steps of the second embodiment, emphasis is placed on describing the differences from the first embodiment, and for the same points, reference may be made to the first embodiment.
[0071] S101: When the mobile platform enters the unknown area, the current position of the mobile platform corresponds to the sub-area where the starting point of the map storage system is located.
[0072] S102: Mark the sub-reg...
Embodiment 3
[0090] Embodiment 3 of the invention provides a coverage system for self-construction of maps by mobile platforms in unknown areas, including: a drive system, a relative positioning system, a map storage system, and a control system. in:
[0091] The drive system is used to drive the displacement of the mobile platform.
[0092] The relative positioning system is used to determine the relative position of the area where the mobile platform is located after the movement relative to the area where it was located before the movement.
[0093] The map storage system is used to mark sub-areas in the pre-stored virtual map centered on the starting point and including multiple sub-areas as traversed areas.
[0094] The control system is used to control the map storage subsystem to correspond the starting point of the pre-stored virtual map with the current position of the mobile platform when the mobile platform enters an unknown area, and control the map storage subsystem to compar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More