

Plant protection unmanned plane autonomous flight path optimization device and method
A plant protection drone and flight path technology, applied in the field of plant protection drones, can solve the problems that the aircraft cannot avoid in time, delay the aircraft too late to avoid, hidden dangers, etc., so as to reduce the repeated coverage rate, improve the accuracy and operation efficiency, The effect of reducing labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
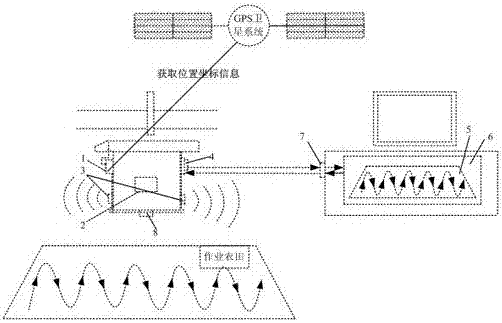
[0036] Such as figure 1 As shown, a plant protection UAV autonomous flight path optimization device, including:
[0037] Set on the plant protection drone for collecting the horizontal coordinates and height coordinates of the plant protection drone, and an airborne GPS antenna 1 communicating with the GPS satellite system;
[0038] A flight control system 2 set on the plant protection drone for controlling the flight and sowing operations of the plant protection drone;
[0039] The airborne relative height detector 3 that is arranged on the plant protection drone for detecting the height of the plant protection drone relative to the ground;
[0040] An airborne camera 8 set on the plant protection drone for aerial sampling of the farmland;
[0041] It is set on the plant protection UAV for returning the data obtained by the airborne GPS antenna 1, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More