Manual multi-degree of freedom micro-manipulator for surgical operation
A surgical and micromanipulator technology, applied in the field of medical devices, can solve problems such as improving the difficulty of surgical operations, reducing surgical efficiency, and patient damage, and achieving good stability and flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Hereinafter, the present invention will be described in more detail with examples in conjunction with the accompanying drawings:
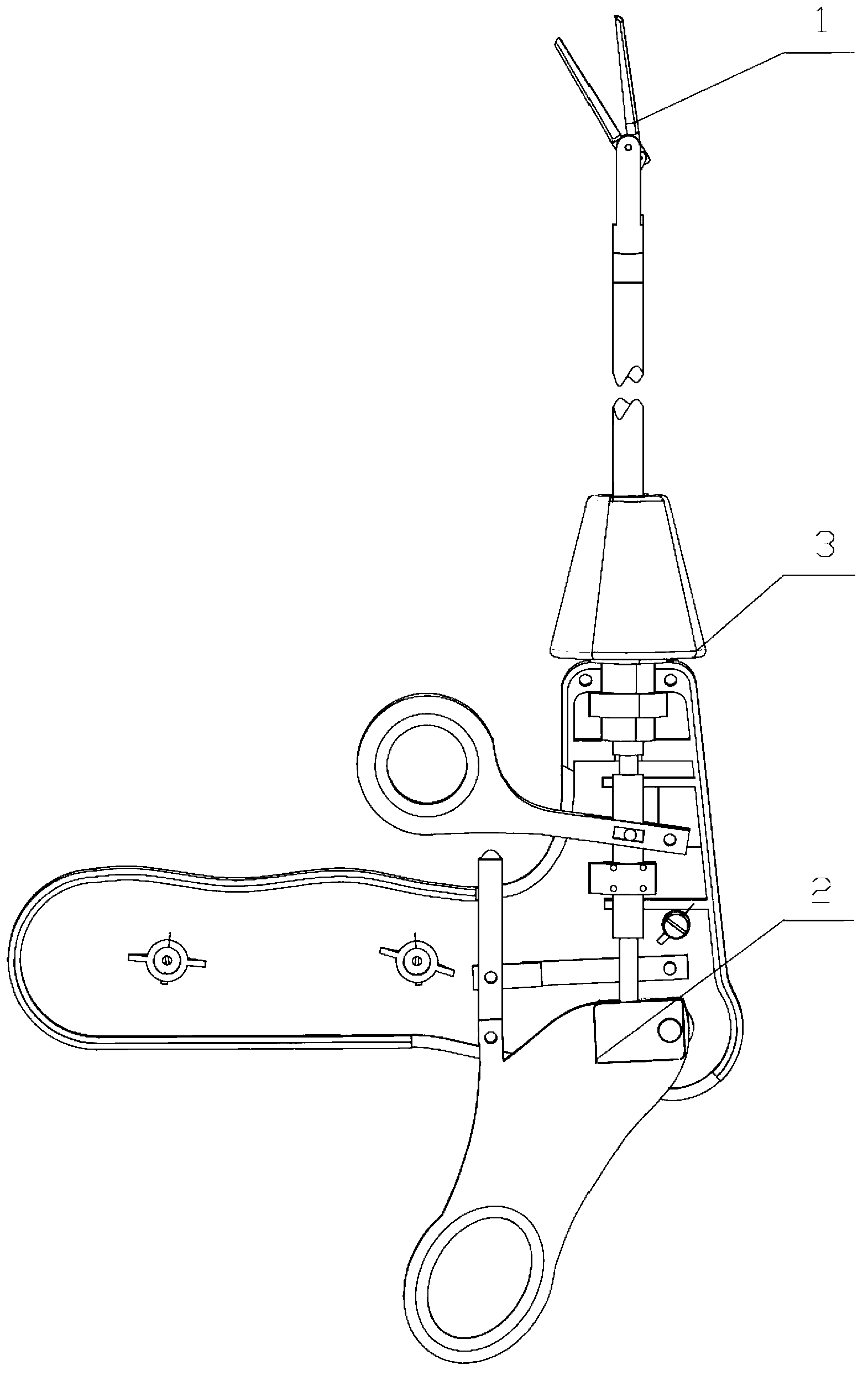
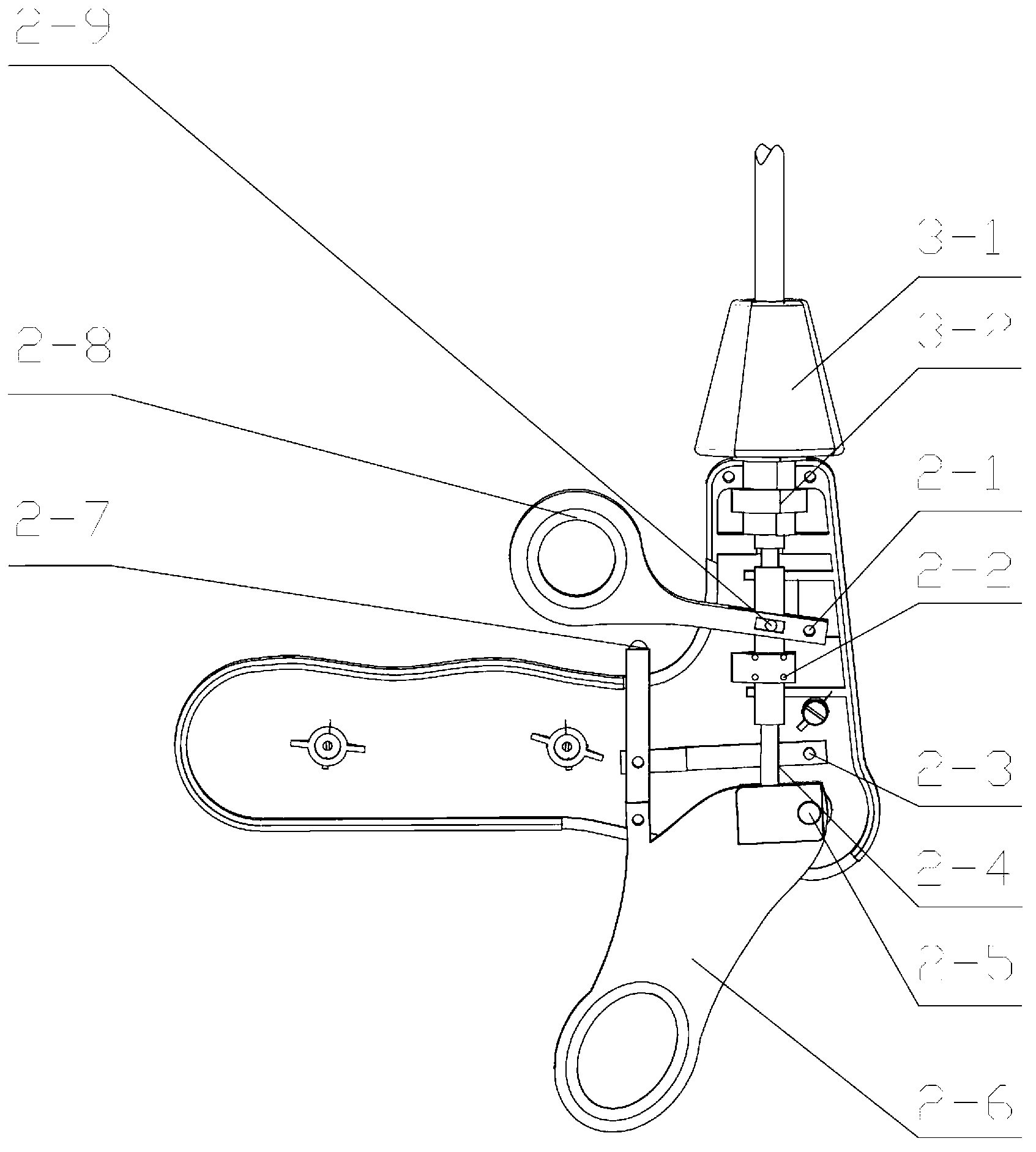
[0016] Combine Figure 1~3 , Combined figure 1 The manual multi-degree-of-freedom manipulator for surgery of the present invention is mainly composed of a fingertip clamping mechanism 1, a driving mechanism 2, and a rotating joint 3.
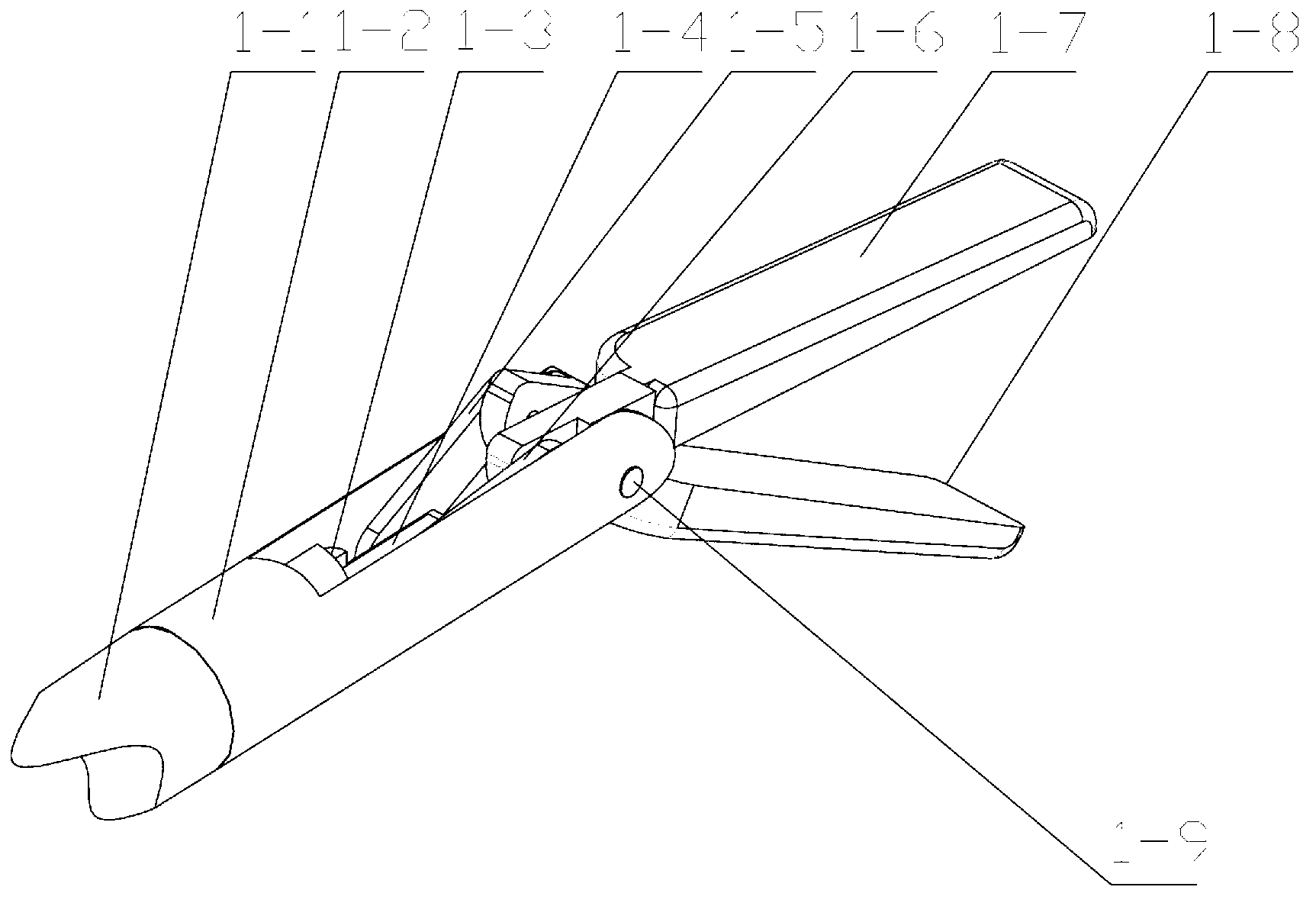
[0017] Combine figure 2 , Fingertip clamping mechanism consists of fingertips 1-7, fingertips 1-8, connecting shaft 1-9, connecting rod 1-5, connecting rod 1-6, connecting sleeve 1-2, long tube sleeve 1-1, Long putter 1-3, long putter 1-4. The fingertips 1-7 and 1-8 are connected to the connecting sleeve 1-2 through the connecting shaft 1-9, and the connecting sleeve 1-2 is fixedly connected with the long tube sleeve 1-1. The long push rod 1-3 and the long push rod 1-4 reciprocate in the long pipe sleeve 1-1. The two ends of the connecting rods 1-5 are respectively hinged with the fingertips 1-7 and the long pu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More