

Line robot drive arm with obstacle crossing function
A technology for driving arms and robots, applied in the field of robots, can solve problems such as difficult control, complex mechanical structure, complex control, etc., and achieve the effects of simple and compact structure, simple path planning, and strong operability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and embodiments. It should be noted that the following description is only for explaining the present invention and not limiting its content.
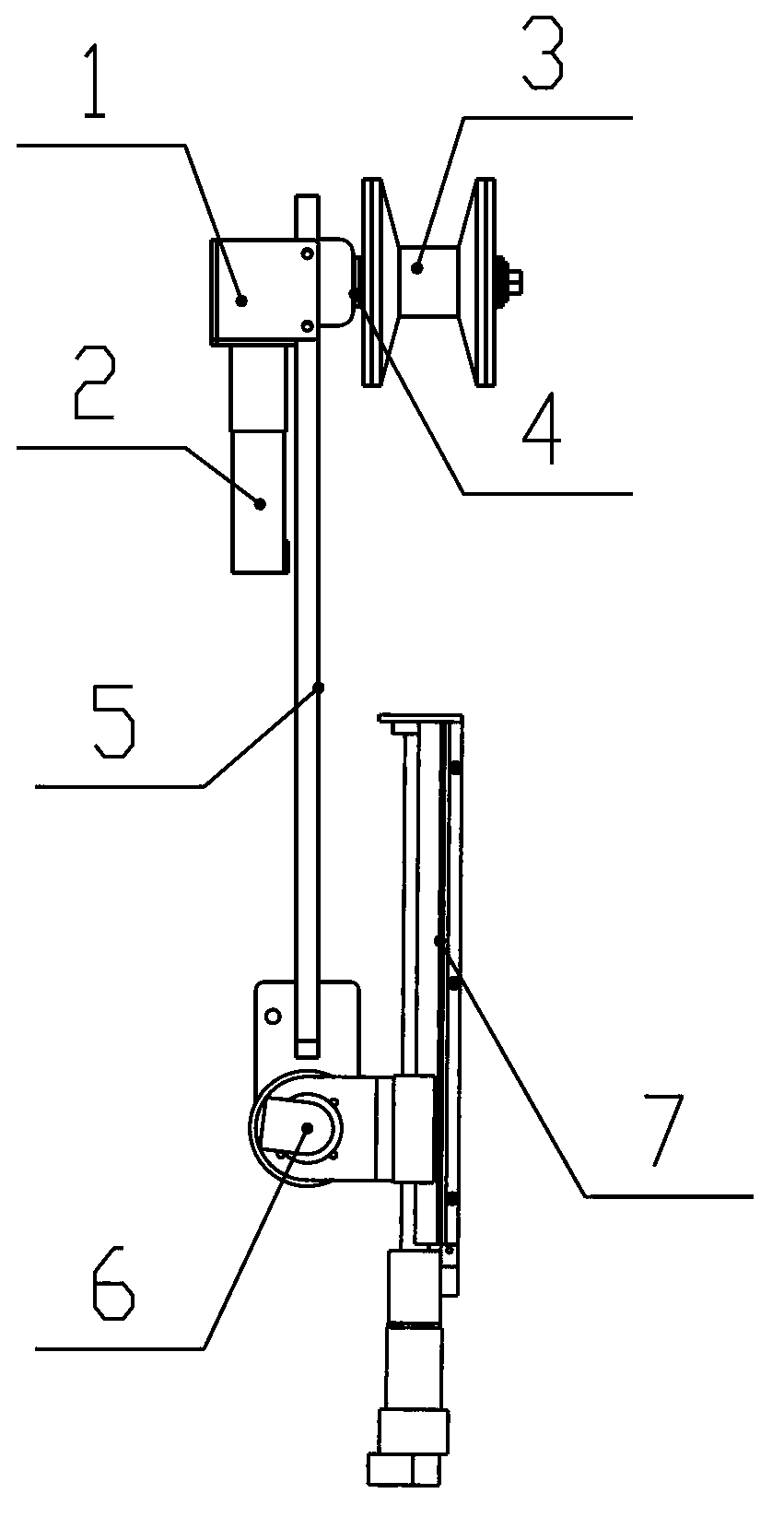
[0030] Such as figure 1As shown, the present invention includes a driving wheel mechanism, a lifting joint 7 and a rotary joint 6, and the lower end of the driving wheel mechanism is connected with the lifting joint 7 through the rotary joint 6.
[0031] The drive wheel mechanism includes a fixed plate 5, on which a drive shaft 4 is hinged, and the two ends of the drive shaft 4 are respectively provided with a drive wheel 3 and a transmission device 1, and the lower end of the transmission device 1 is fixed with a drive motor 2. The driving arm is suspended on the split wire by the driving wheel 3. The transmission device 1 is gear transmission, synchronous belt transmission or worm gear transmission.
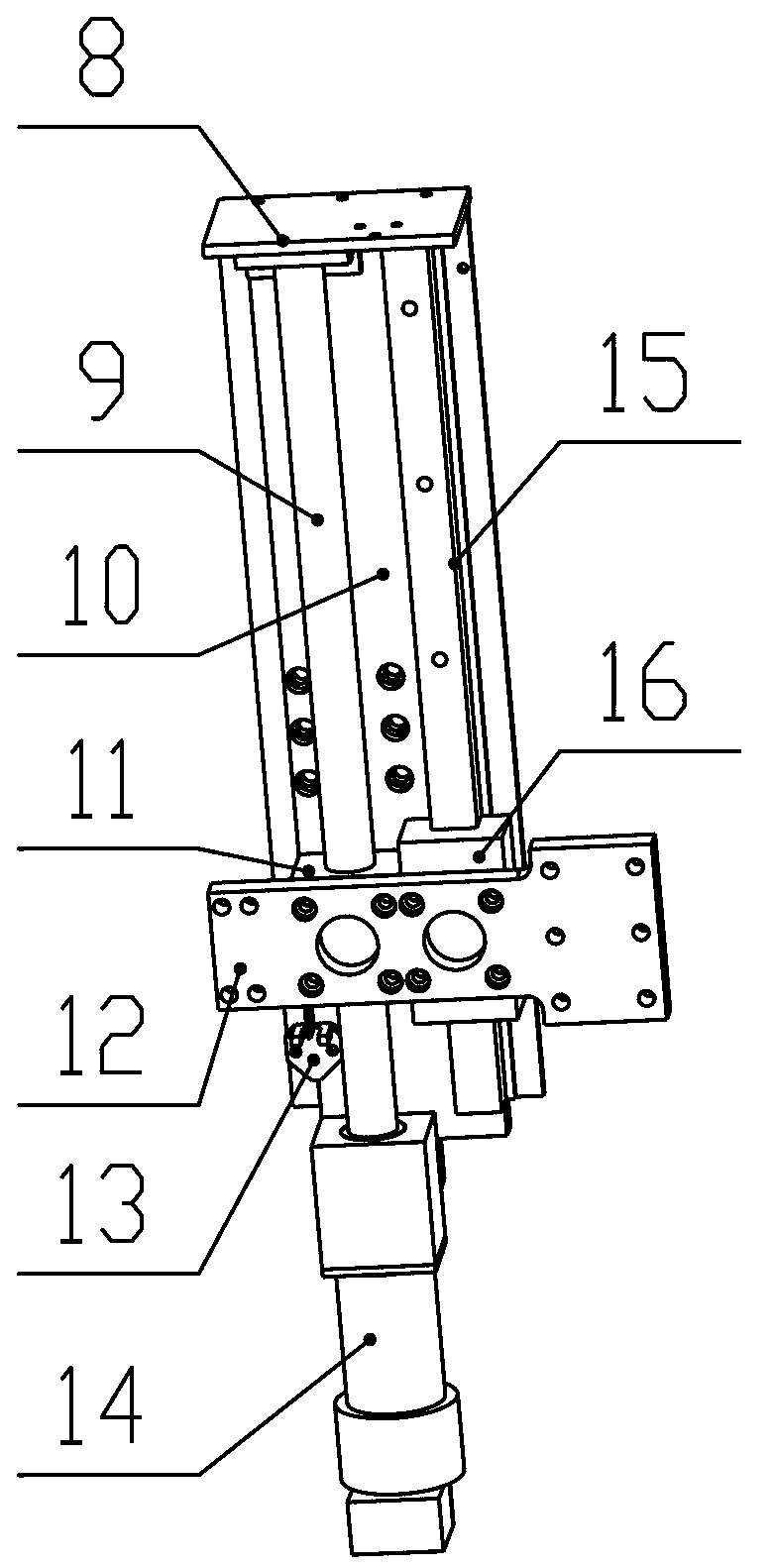
[0032] Such as figure 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More