

Automatic guided vehicle (AGV) trolley plane positioning navigation system and method
A plane positioning and navigation system technology, applied in the field of positioning and navigation, can solve the problems of system complexity and increased cost, achieve accurate distance measurement, improve work efficiency, and avoid laying work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
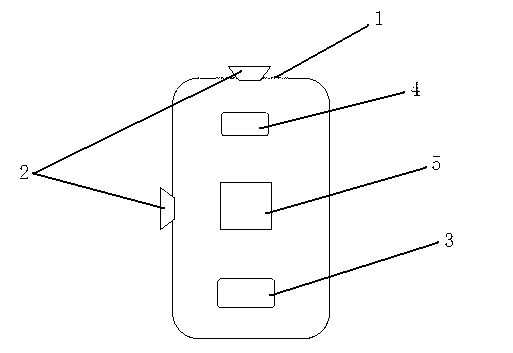
[0020] refer to figure 1 , an AGV trolley plane positioning and navigation system of the present invention includes: an AGV trolley 1, a map database, an ultrasonic sensor module 2, a steering gear module 3, a rotation angle sensor module 4, and a microprocessor module 5. There are two ultrasonic sensor modules, one is installed at the front center of the AGV car 1, and the other is installed at the left center of the AGV car 1. The angle sensor module 4 is installed on the steering shaft tube of the AGV trolley. The steering gear module 3 is connected with the steering wheel linkage. The map database is stored in the microprocessor module 5 for the microprocessor module 5 to read road information. The microprocessor module 5 performs algorithm processing according to the data of all parties, locates the AGV car 1, and controls the AGV car 1 to tra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More