

Obstruction automatic recognition system for collision preventing of large-scale autonomous underwater vehicle (AUV)
A technology for identifying systems and obstacles, applied in character and pattern recognition, radio wave measurement systems, using re-radiation, etc., can solve problems such as AUVs not moving in the correct direction, misjudgment of collision avoidance systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described in detail below with reference to the accompanying drawings and examples.
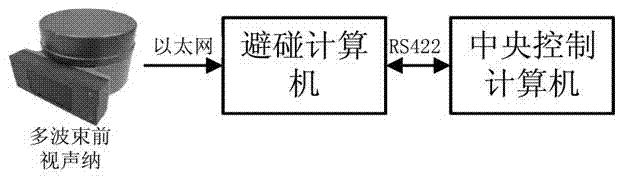
[0051] Such as figure 1 As shown, the large-scale AUV collision avoidance obstacle autonomous identification system of the present invention includes a multi-beam forward-looking sonar, a collision avoidance computer and a central control computer, and the multi-beam forward-looking sonar and the collision avoidance computer communicate through a network. After the beam forward-looking sonar is powered on, it waits for the control command of the collision avoidance computer. When receiving the work order, it immediately returns the sonar data to the collision avoidance computer. The collision avoidance computer receives the sonar data for real-time processing, and simultaneously controls the multi-beam forward-looking sound accept. The collision avoidance computer is connected with the central control computer through RS422, and the collision avoidance co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More