Communication time delay compensation based multi-surface unmanned vehicle co-location method
A technology of cooperative positioning and communication delay, which is applied in the field of navigation and positioning, and can solve problems such as the influence and increase of collaborative positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0067] Specific embodiments 1. A multi-surface unmanned vehicle cooperative positioning method based on communication delay compensation, which is realized by the following steps:
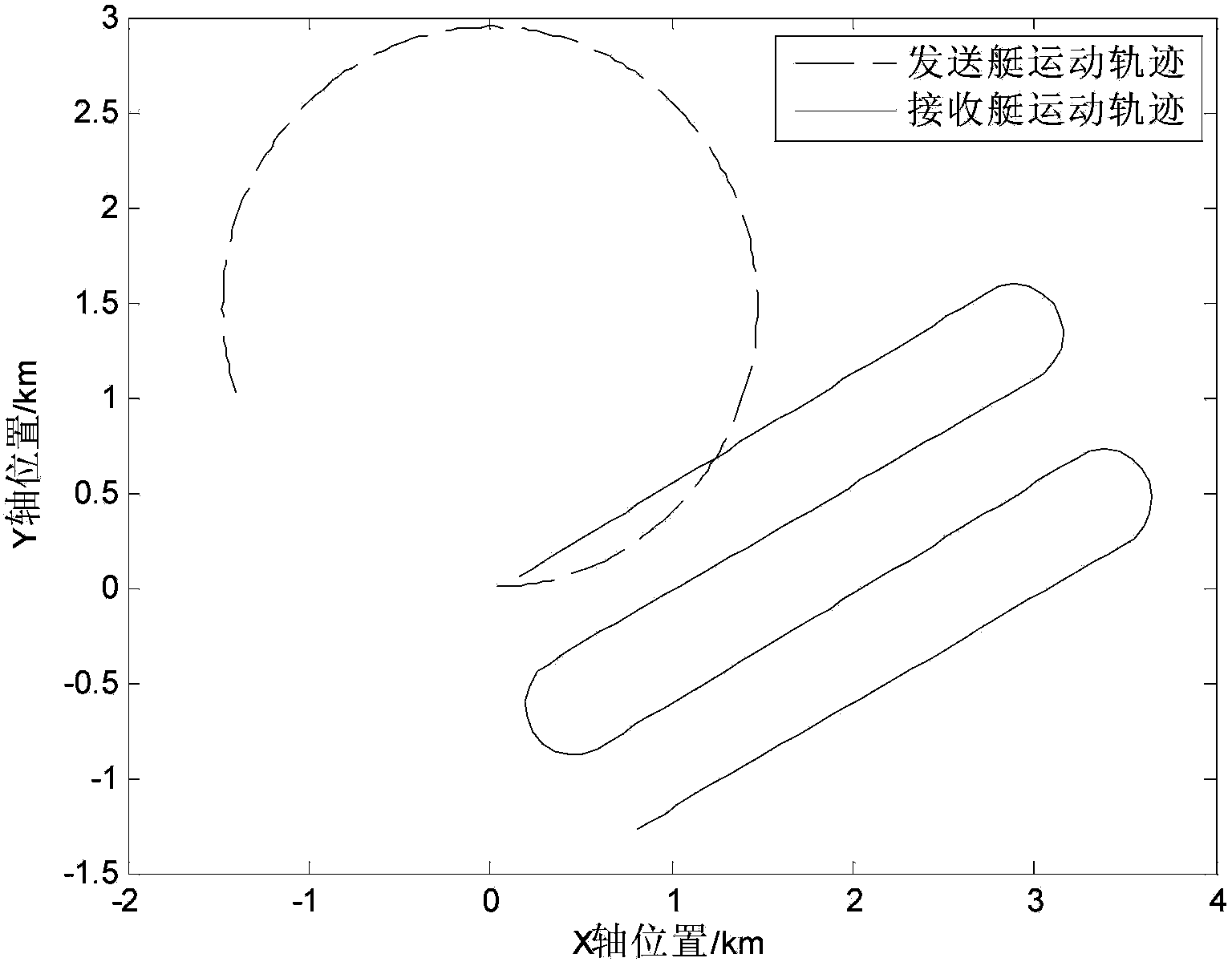
[0068] Step 1, the receiving boat collects the relative positioning information sent by the sending boat: the position information of the sending boat (relative to the relative position information x of the starting point a 、y a ) and the distance information r of the two boats; the receiving boat collects its own navigator positioning information: the speed V b and the heading rate w b ;
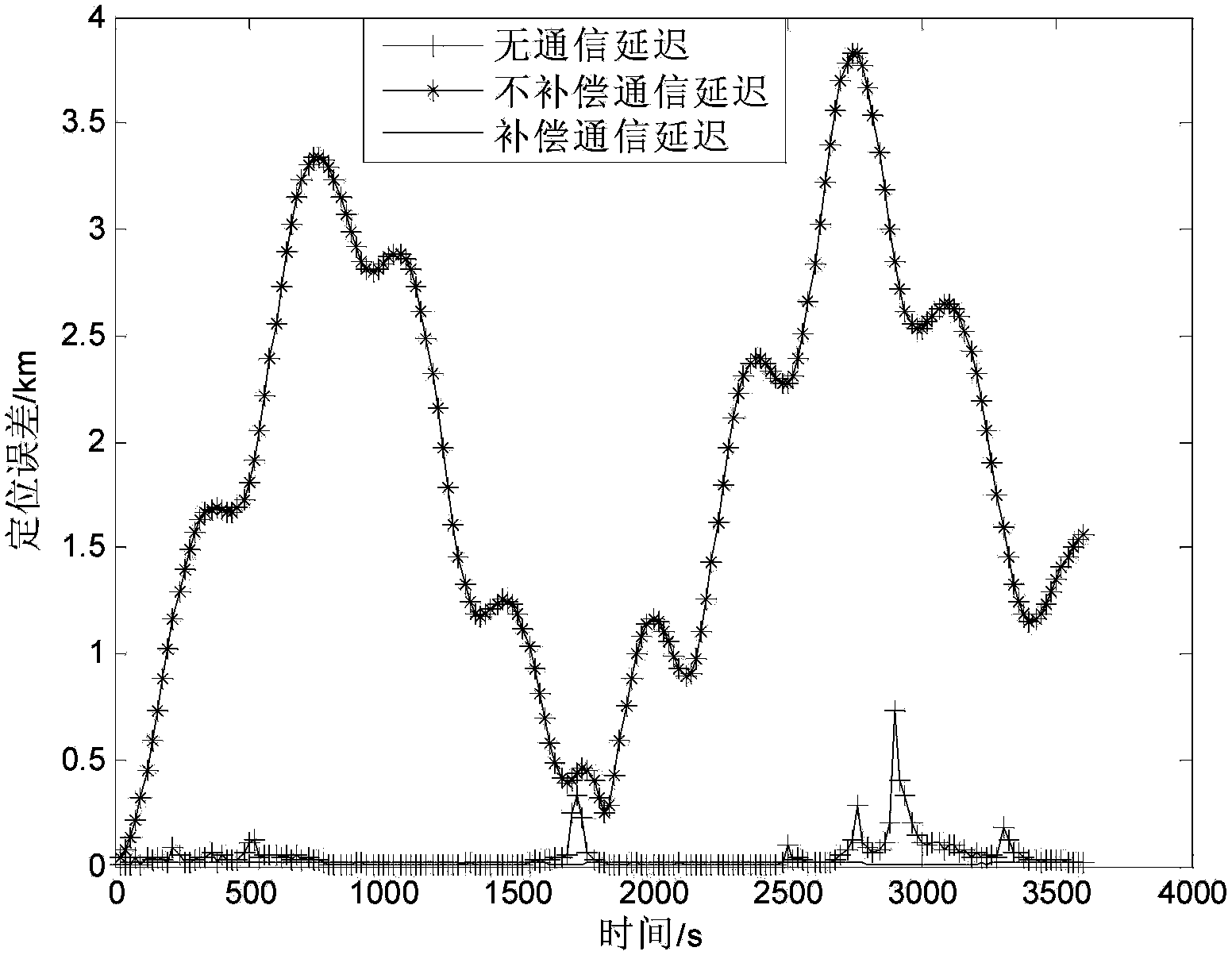
[0069] Step 2. Calculate the information delay time received this time through the universal standard time system carried by the receiving boat itself and the time stamp loaded in the relative positioning information sent by the sending boat, and compare it with the filtering cycle to obtain the received positioning information delay time. step size N;
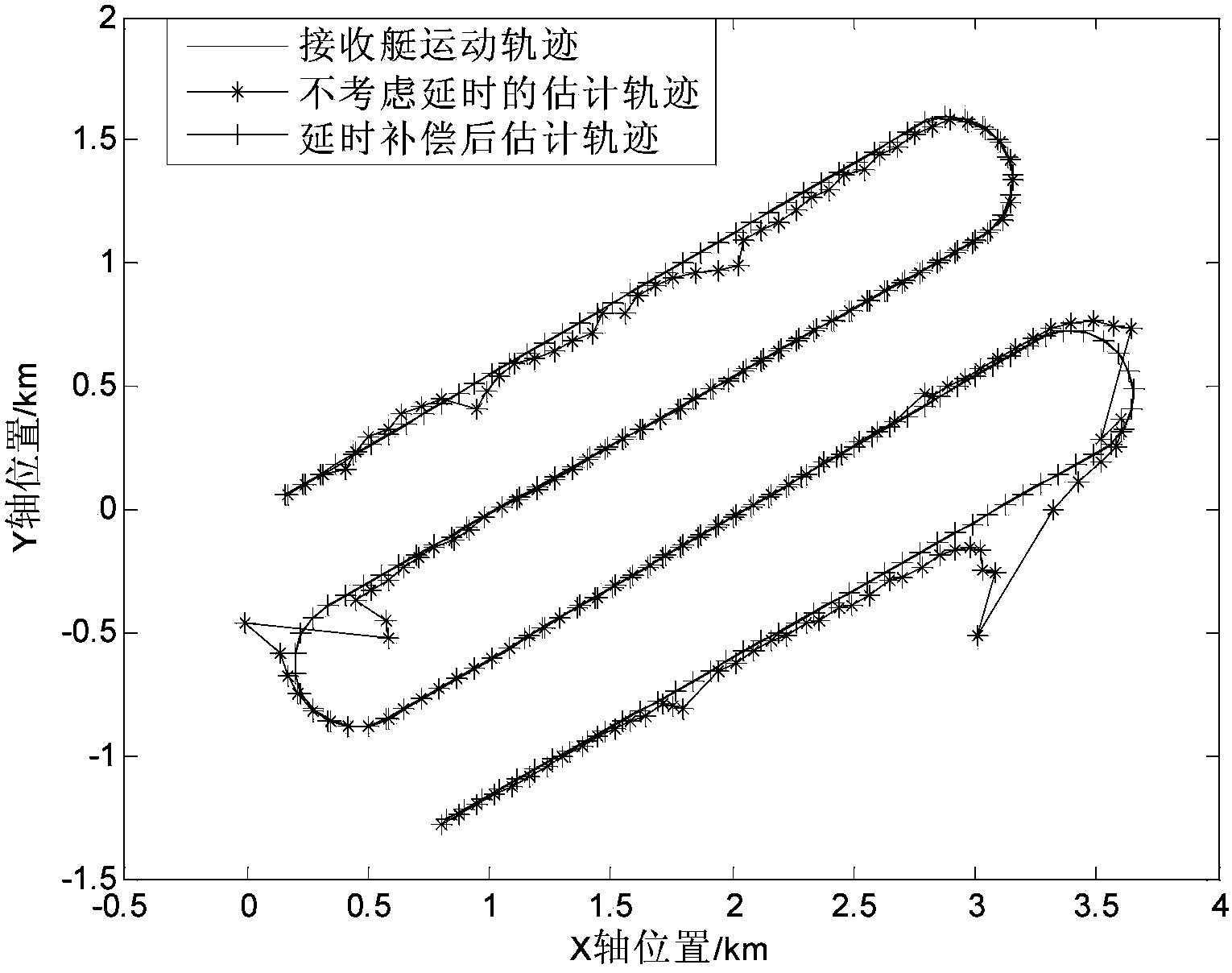
[0070] Step 3: Using the positioning information colle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com