

Open area target detection and tracking method based on binocular vision sparse point matching
A binocular vision and area target technology, applied in the field of target detection and tracking in open areas based on binocular vision sparse point matching, can solve the problems of large amount of calculation, easy to generate false matching, clustering failure, etc., to achieve target detection and Accurate tracking, small amount of calculation, and the effect of meeting real-time requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Below in conjunction with specific embodiment, further illustrate the present invention. It should be understood that these examples are only used to illustrate the present invention and are not intended to limit the scope of the present invention. In addition, it should be understood that after reading the teachings of the present invention, those skilled in the art can make various changes or modifications to the present invention, and these equivalent forms also fall within the scope defined by the appended claims of the present application.
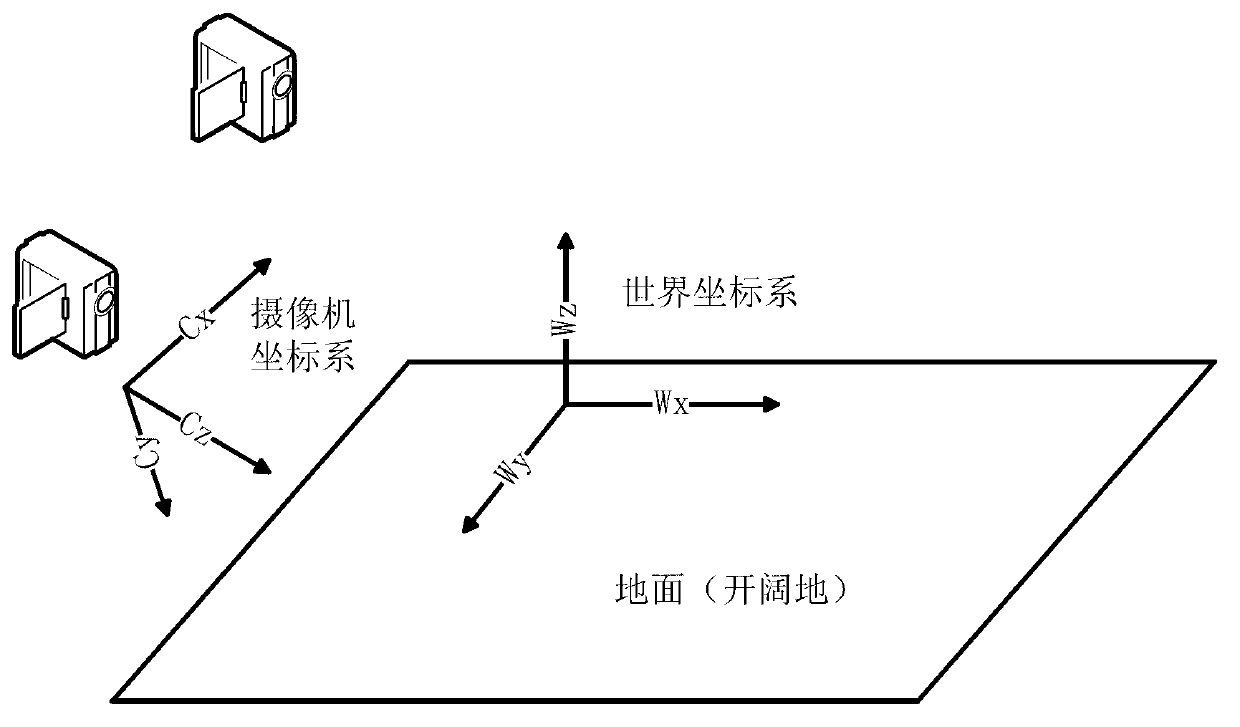
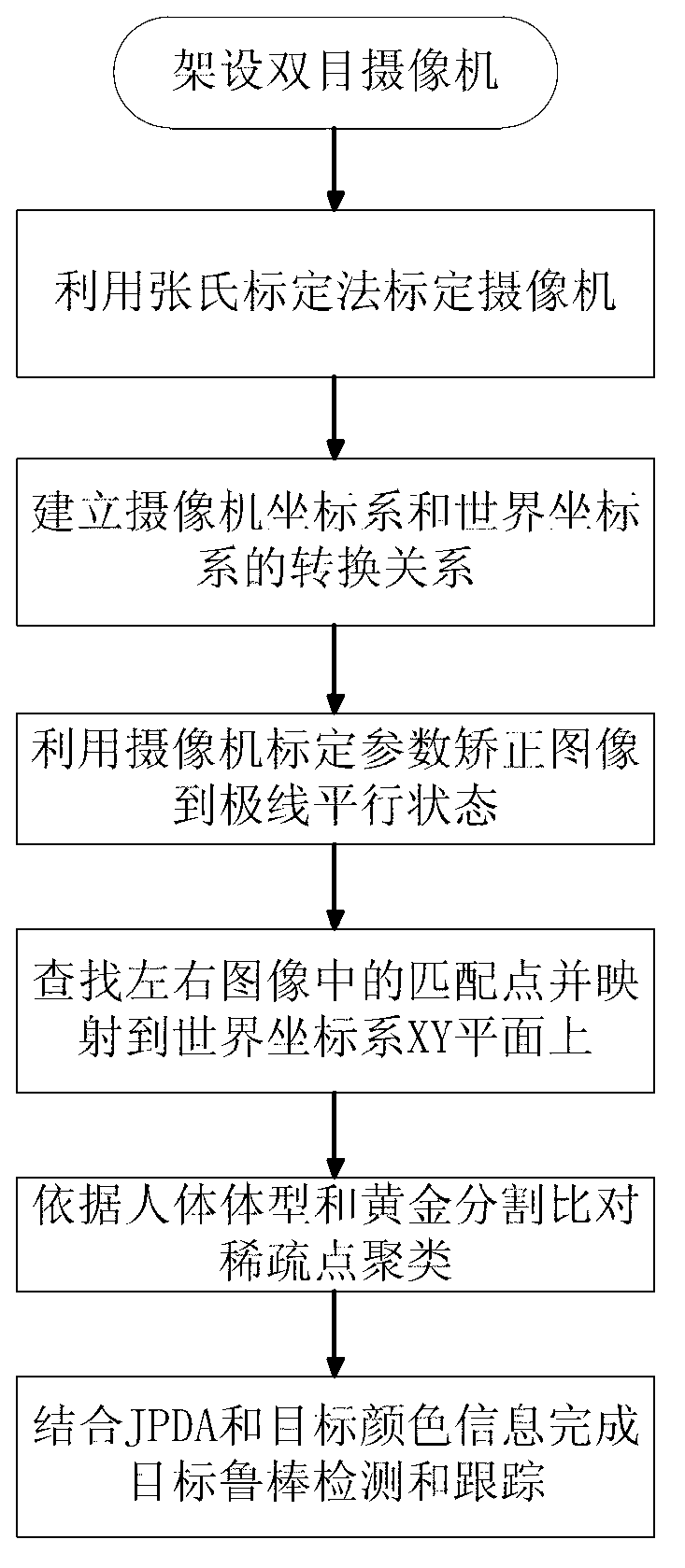
[0038] The embodiment of the present invention relates to a method for object detection and tracking in an open area based on binocular vision sparse point matching, including the following steps: use Zhang's checkerboard calibration method to complete the calibration of the camera, and establish the camera coordinate system and the world defined by the user Conversion relationship between coordinate systems. Afterwards, the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More