

Intelligent walk-assisting robot
A technology of intelligent walking and robotics, applied in the direction of equipment to help people move, physical therapy, etc., can solve the problems such as stability and labor saving, unable to determine the range of activities, unable to notify the guardian in time when the patient has an accident, etc. The contradictory effect of labor saving and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
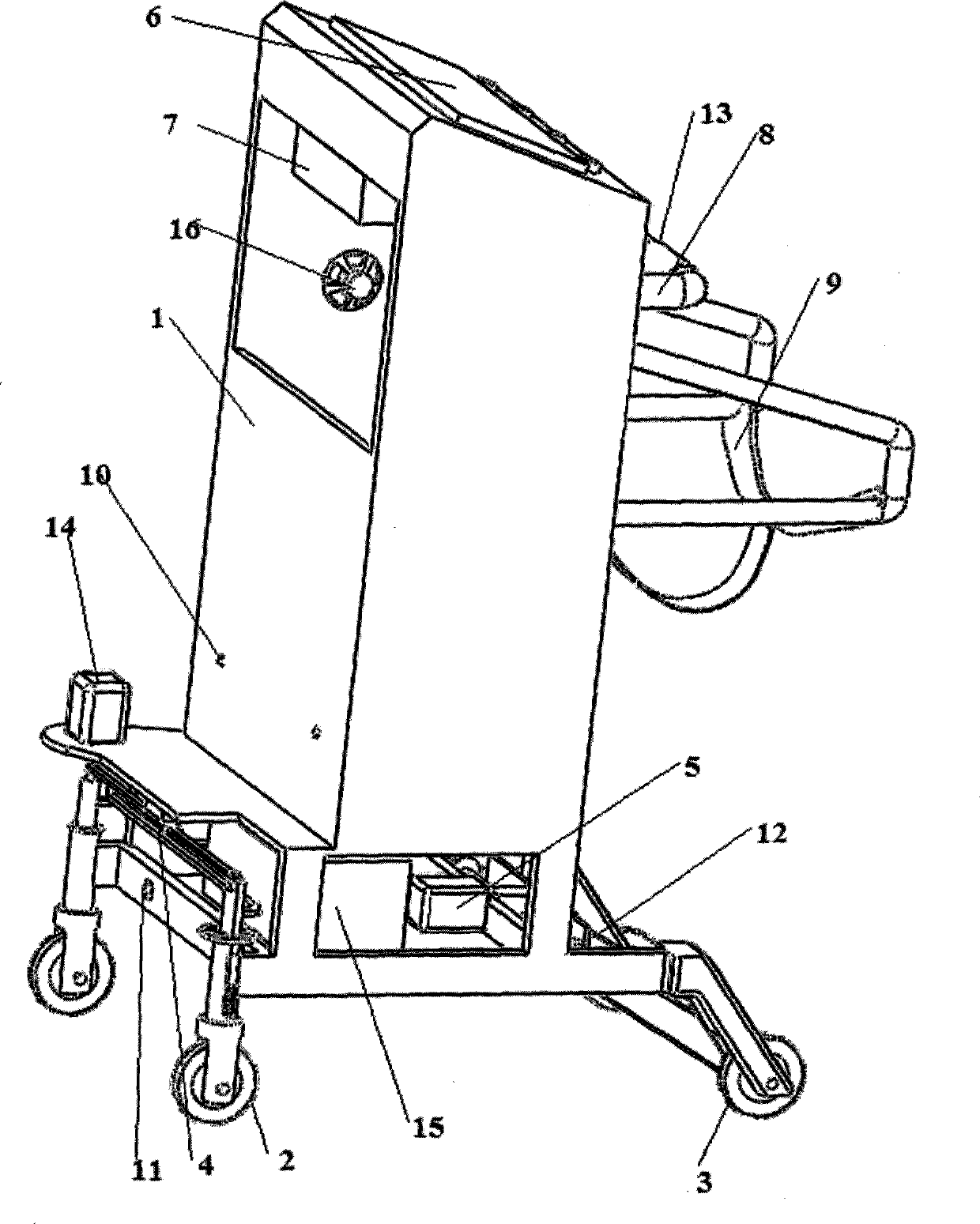
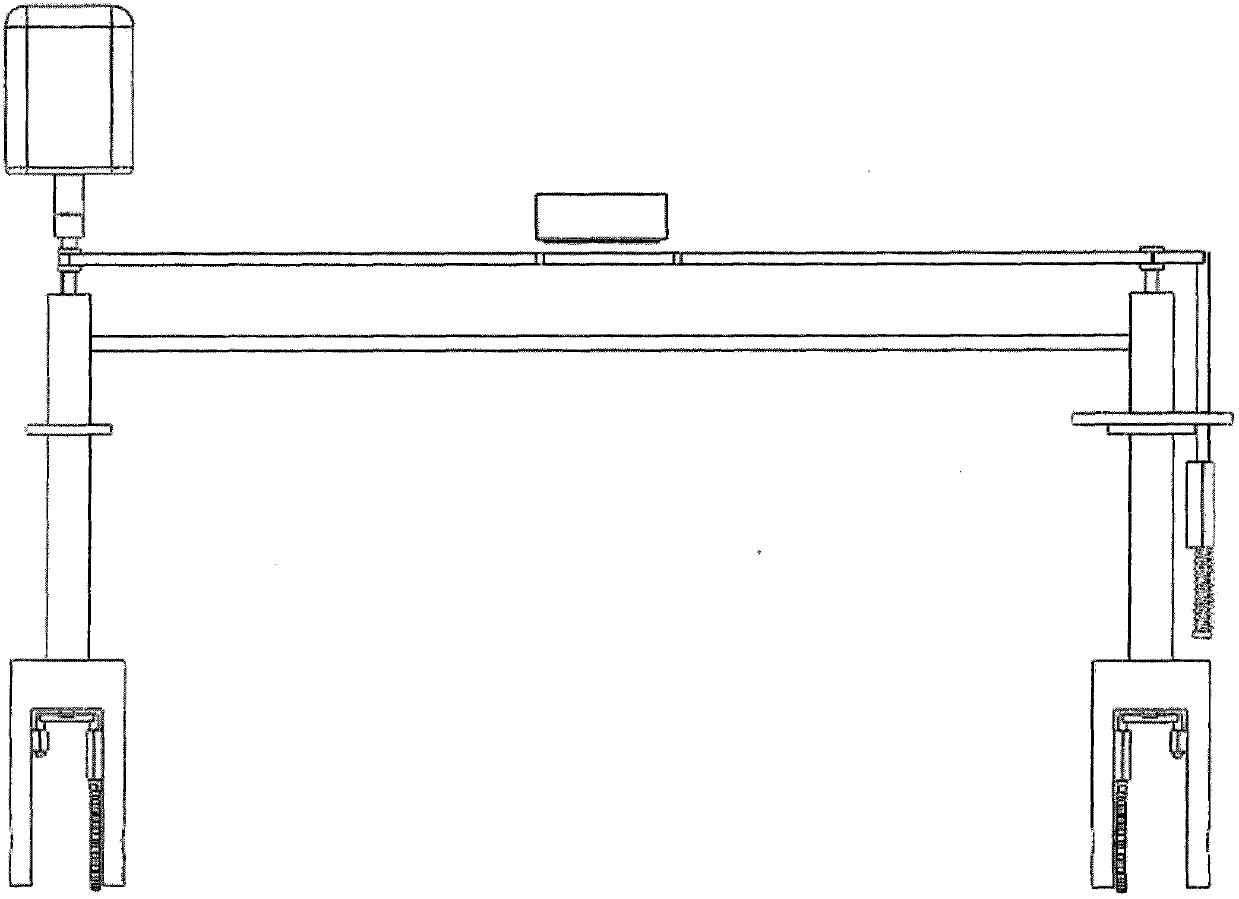
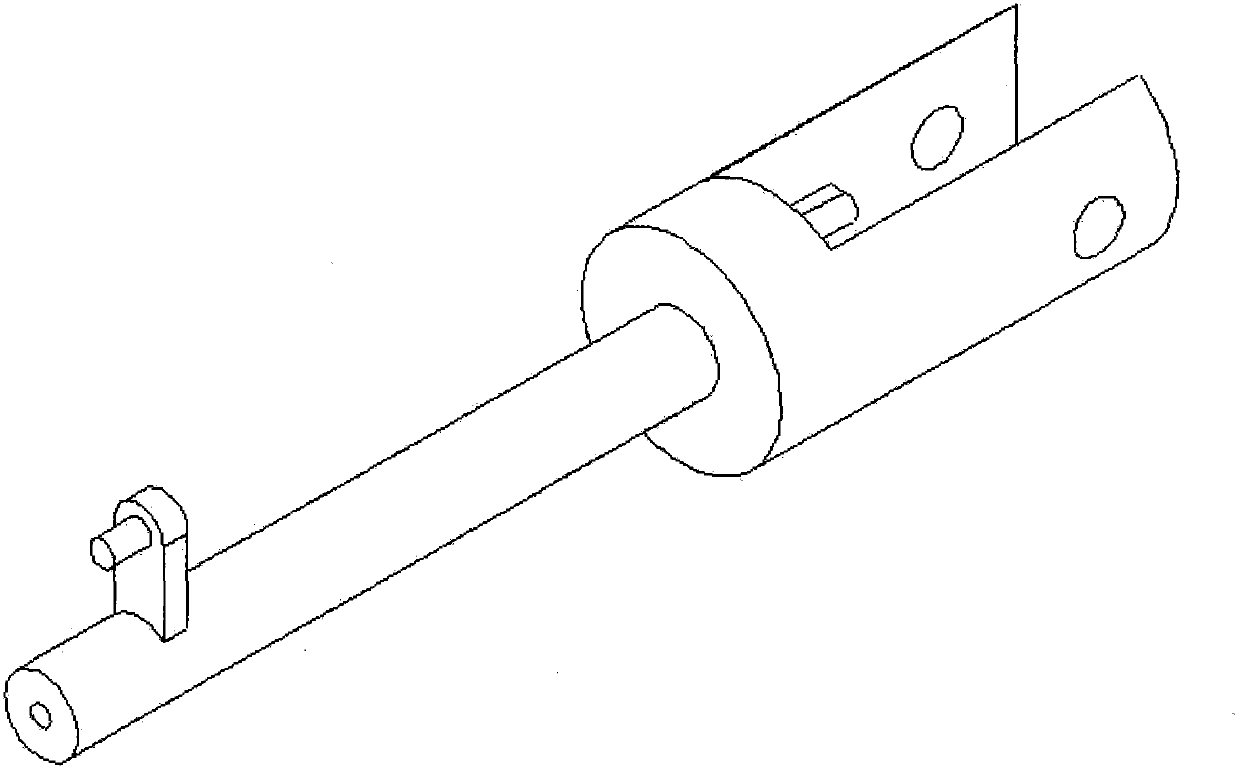
[0021] Combine below Figure 1-6 This embodiment will be described.
[0022] This embodiment is realized in this way, a square column body is used as the robot main body 1, the bottom of the main body is supported by four wheels, the front two are guide wheels 2, the back two are drive wheels 3, and there is a guide control device 4 above the guide wheels , including guide bar adjustment, guide locking and fixed locking three parts, the driving control device 5 is arranged above the driving wheel, including two parts of motor driving and fixed locking. A control and display panel 6 is installed on the body for setting control parameters and actual motion data. A controller 7 is installed inside the body to control the movement of the robot, including a control chip, signal conditioning channel, data memory, execution drive channel, signal reception and transmission device, etc., and is connected with the control and display panel, and the armrests 8 are fixed on both sides ab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More