

Unmanned aerial vehicle flying leg switching method based on leg distance and relative location vector dot product
A relative position and unmanned aerial vehicle technology, applied in position/direction control, vehicle position/route/altitude control, non-electric variable control, etc., can solve problems such as inability to realize flight segment switching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The specific implementation steps of the present invention will be further described below in conjunction with the accompanying drawings.
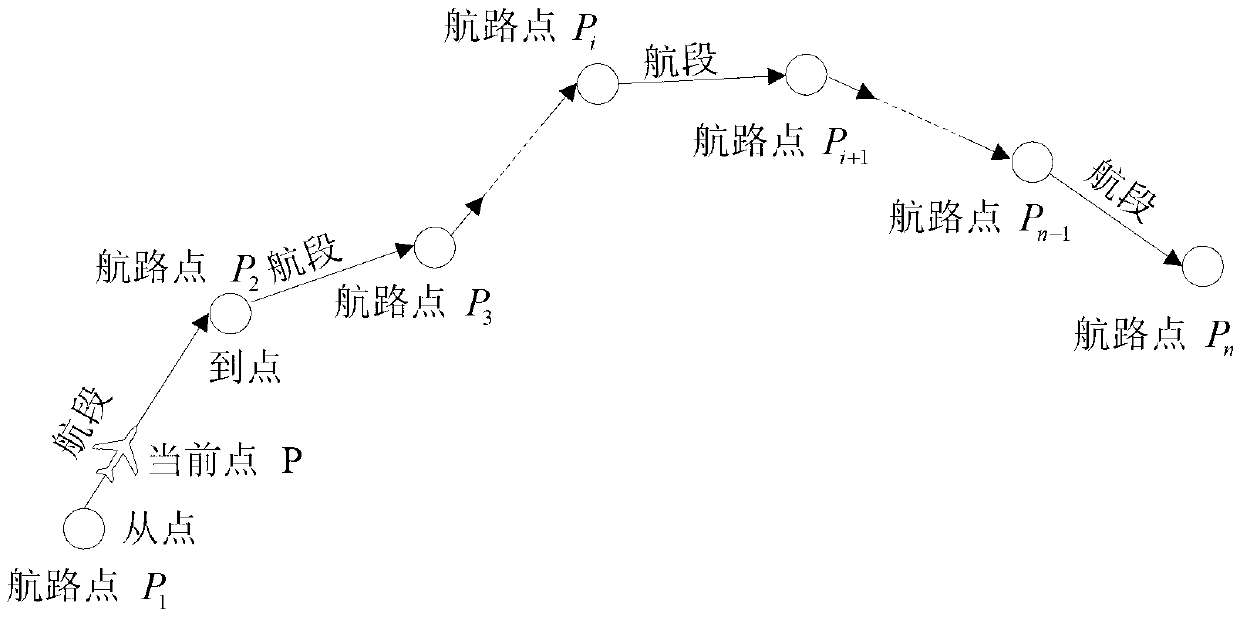
[0056] The present invention proposes a flight segment switching method of an unmanned aerial vehicle, which is based on the segment distance and the relative position vector dot product, so that the drone can correctly realize the segment switching when the GPS signal is normal throughout the whole process or after recovery from a fault , the flight segment switching flow chart is as follows Figure 5 As shown, the specific implementation steps are as follows:
[0057] Step 1: Determine whether the GPS signal is normal. When the GPS signal is normal, go to step 2; when the GPS signal is invalid, go to step 5;
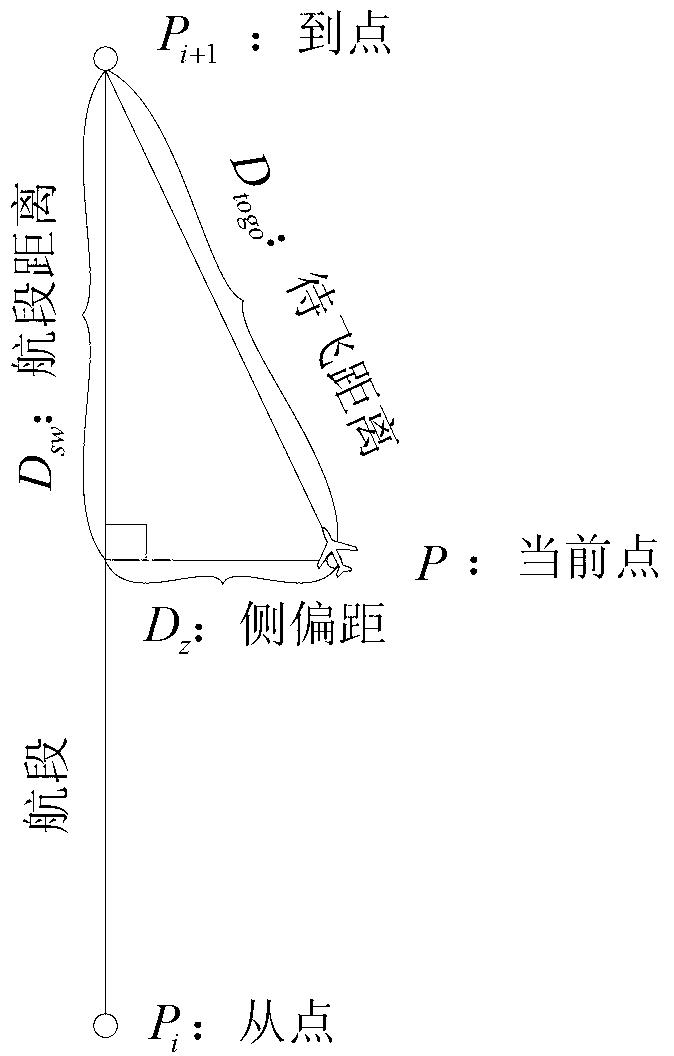
[0058] Step 2: Calculate the distance to fly D according to the latitude and longitude of the current point of the drone togo and offset distance D z , the flight distance D is calculated by the right triangle Pythagorean...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More