

Position and pressure master-slave control method of hydraulic servo system of valve-controlled cylinder
A hydraulic servo system and valve control technology, applied in the direction of fluid pressure actuating system components, fluid pressure actuating devices, mechanical equipment, etc. System control accuracy and the effect of improving system control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
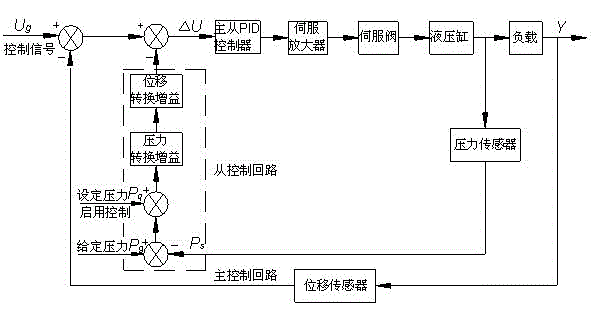
[0022] like figure 1 As shown, in the valve-controlled cylinder hydraulic servo system, the position signal and the pressure signal are two control signals, the position signal is used as the main feedback signal of the whole system, and the position control is used as the main closed-loop control of the whole system; the pressure signal is used as the slave control signal, Pressure feedback control acts as a slave closed-loop control. When the load of the actuator reaches the master-slave control pressure setting range, the position and pressure master-slave control of the valve-controlled cylinder hydraulic servo system starts, and the actual pressure feedback signal measured by the pressure sensor with given control pressure The electrical signal is compared with the pressure deviation signal obtained, the deviation signal is multiplied by the pressure conversion gain and converted into a position deviation signal, the position deviation signal is adjusted by the displac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More