

Transverse lateral curve flight-path tracking method based on curvature compensation
A technology of trajectory tracking and curvature compensation, which is applied in three-dimensional position/channel control and other directions, can solve the problems of unmanned aerial vehicles unable to track the planned trajectory and large tracking error, and achieve good tracking trajectory and reduced tracking error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
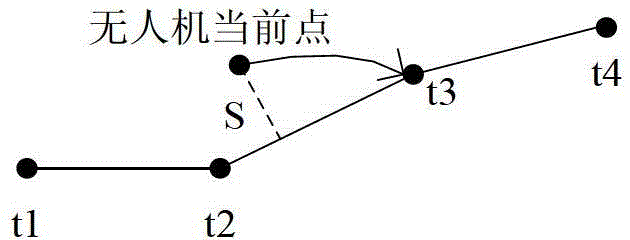
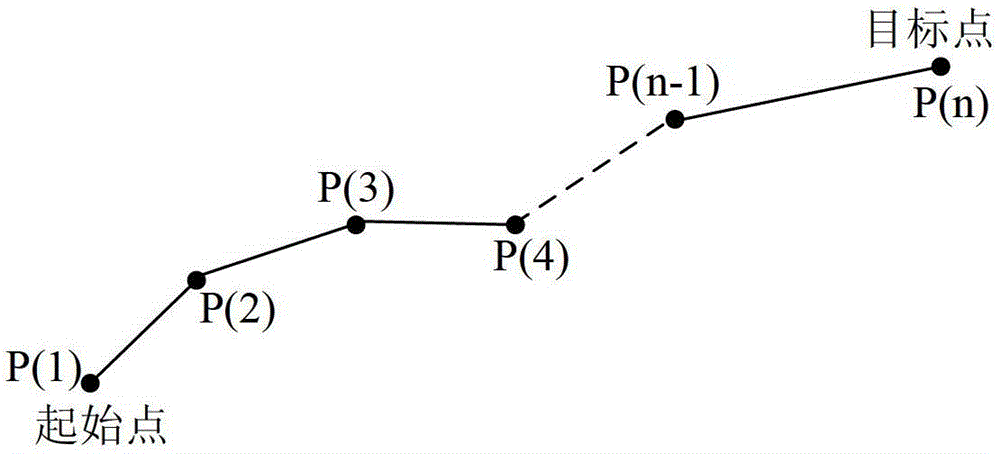
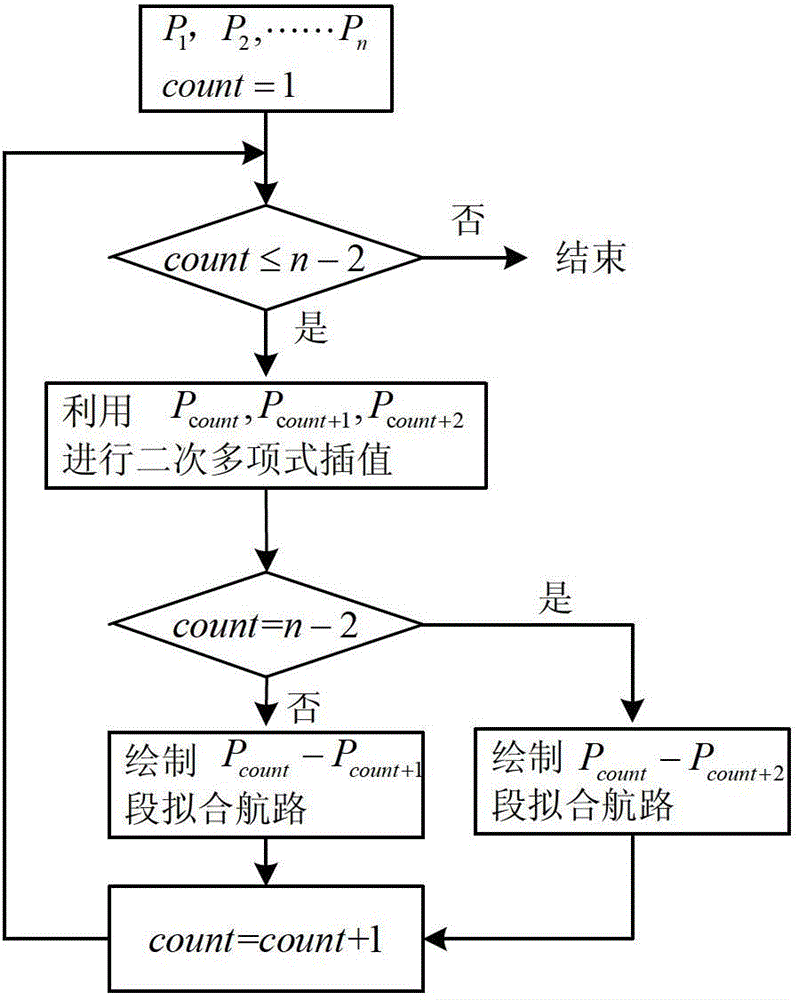
[0022] The present invention proposes a method for tracking lateral curve tracks based on curvature compensation. First, the discrete waypoint data of the reference track is obtained through the track planning module, and then the discrete waypoint data is obtained by using the Lagrangian segmental polynomial interpolation method. Points are subjected to segmental interpolation fitting processing to obtain the curved track, and the shortest distance between the current position of the drone and the reference curve track segment is calculated in real time to obtain the side offset distance of the drone, and at the same time, the closest distance to the aircraft on the reference track can be obtained The coordinates at the point, the curvature value at the corresponding point can be obtained through the curvature calculation formula, and the above-mentio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More