

Remote control method and remote control system for car wheel locator
A remote control system and remote control technology, applied in the direction of wheel testing, etc., can solve the problems of not being able to see the real-time measurement data of the display, reducing the adjustment efficiency, and increasing the operator's workload.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
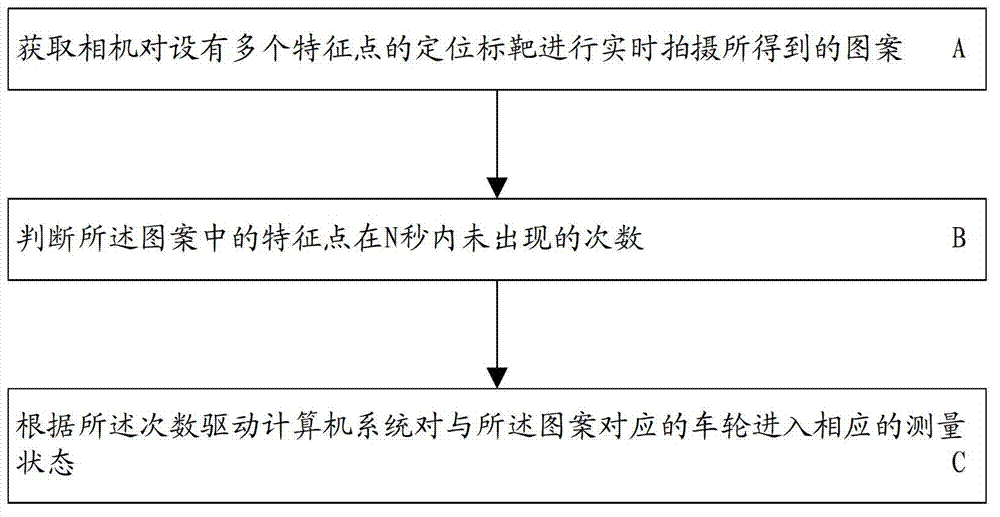
[0032] Please refer to figure 1 As shown, it has shown the main flow of the remote control method of the automobile wheel aligner of the present invention, and the method is applied in the automobile wheel aligner, comprising the following steps:
[0033] In step A, the pattern obtained by the real-time shooting of the positioning target provided with a plurality of feature points by the camera is obtained. On the left front, right front, left rear, and right rear four wheels of the car, a positioning target is installed respectively, and the positioning target is photographed by the camera to obtain the corresponding pattern.
[0034] Proceed to step B to determine the number of times that all feature points in the pattern do not appear within N seconds. In this step, N seconds is a preset time parameter, and the operator can set it accordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More