

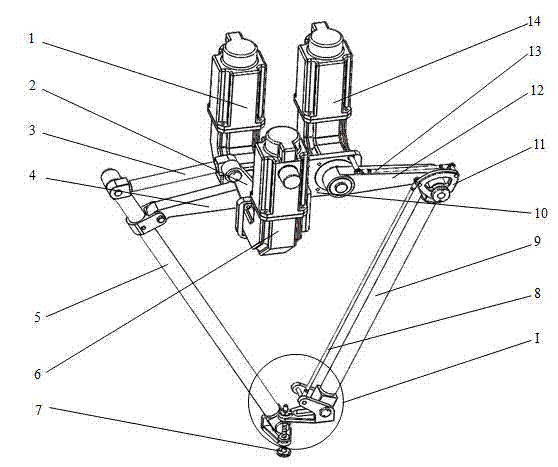
Three-degree-of-freedom parallel robot mechanism
A robot and degree-of-freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficulty in guaranteeing position and attitude accuracy, limiting the acceleration of end effectors, and reducing the scope of the working space of the mechanism, achieving low inertia and high Acceleration, simple structure effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the drawings:
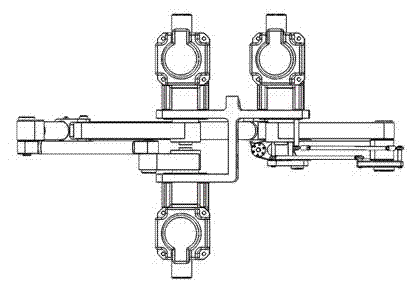
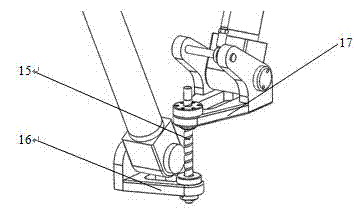
[0019] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 As shown, a three-degree-of-freedom parallel robot mechanism is composed of a frame 10, a driving device, a moving branch chain, a moving platform and a ball screw 15. The movable platform includes a first movable platform 16 and a second movable platform 17, which are arranged parallel to each other. The second movable platform 17 is located above the first movable platform 16; the ball screw 15 and the first movable platform 16 The fixed guide sleeve constitutes a slewing pair, and the ball screw nut fixedly connected to the ball screw 15 and the second movable platform 17 constitutes a screw pair; the end of the ball screw 15 is fixed to the end effector 7; The moving platform forms a closed-loop parallel structure with the frame 10 through the moving branch chain and the ball screw 15; the moving branch chain ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More