

Three-freedom-degree table tennis carrying mechanical arm
A degree of freedom, table tennis technology, applied in the field of robot education, can solve the problem of lack of control objects in robot technology, achieve the effect of improving debugging ability, easy operation, and improving learning interest
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
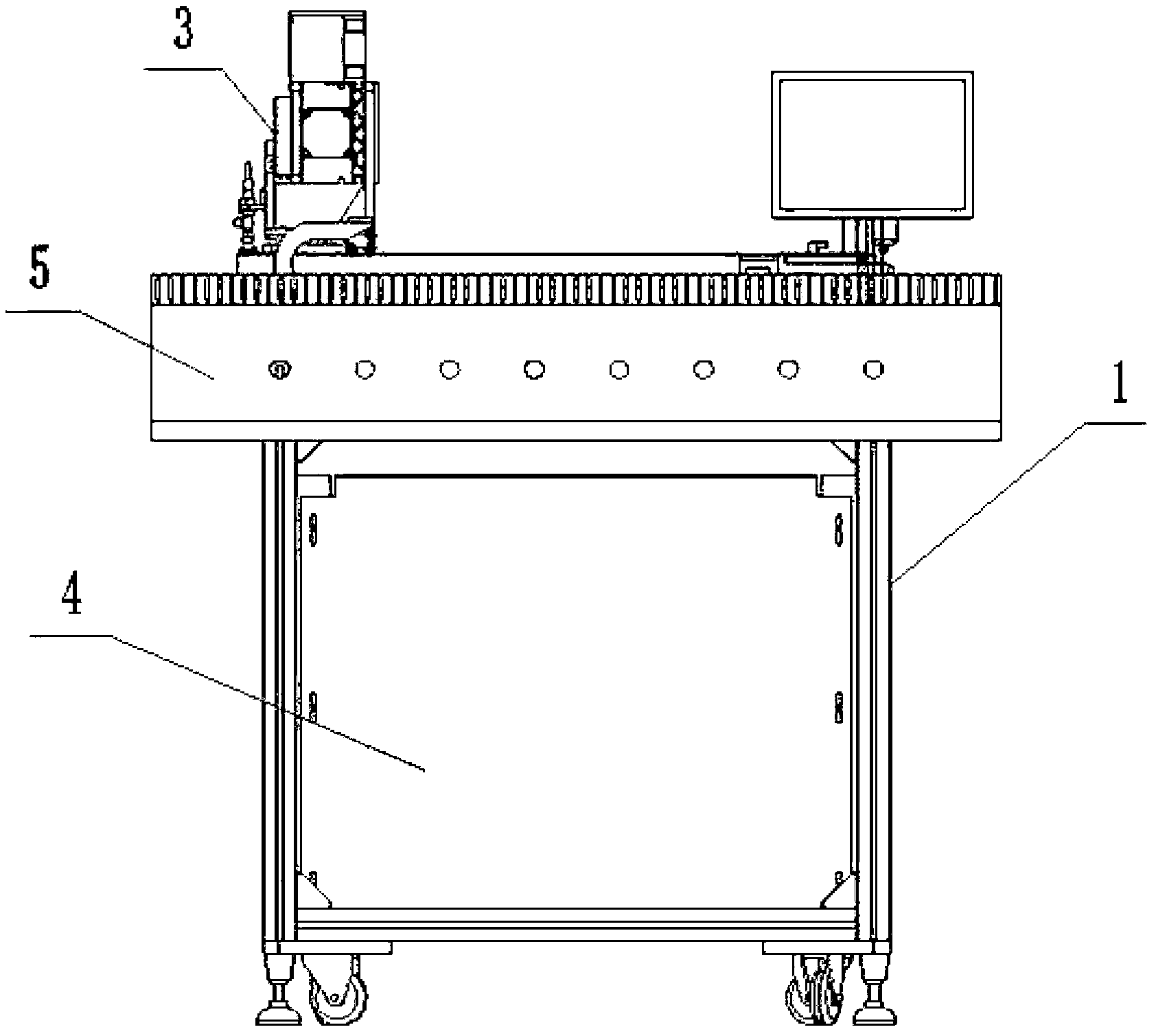
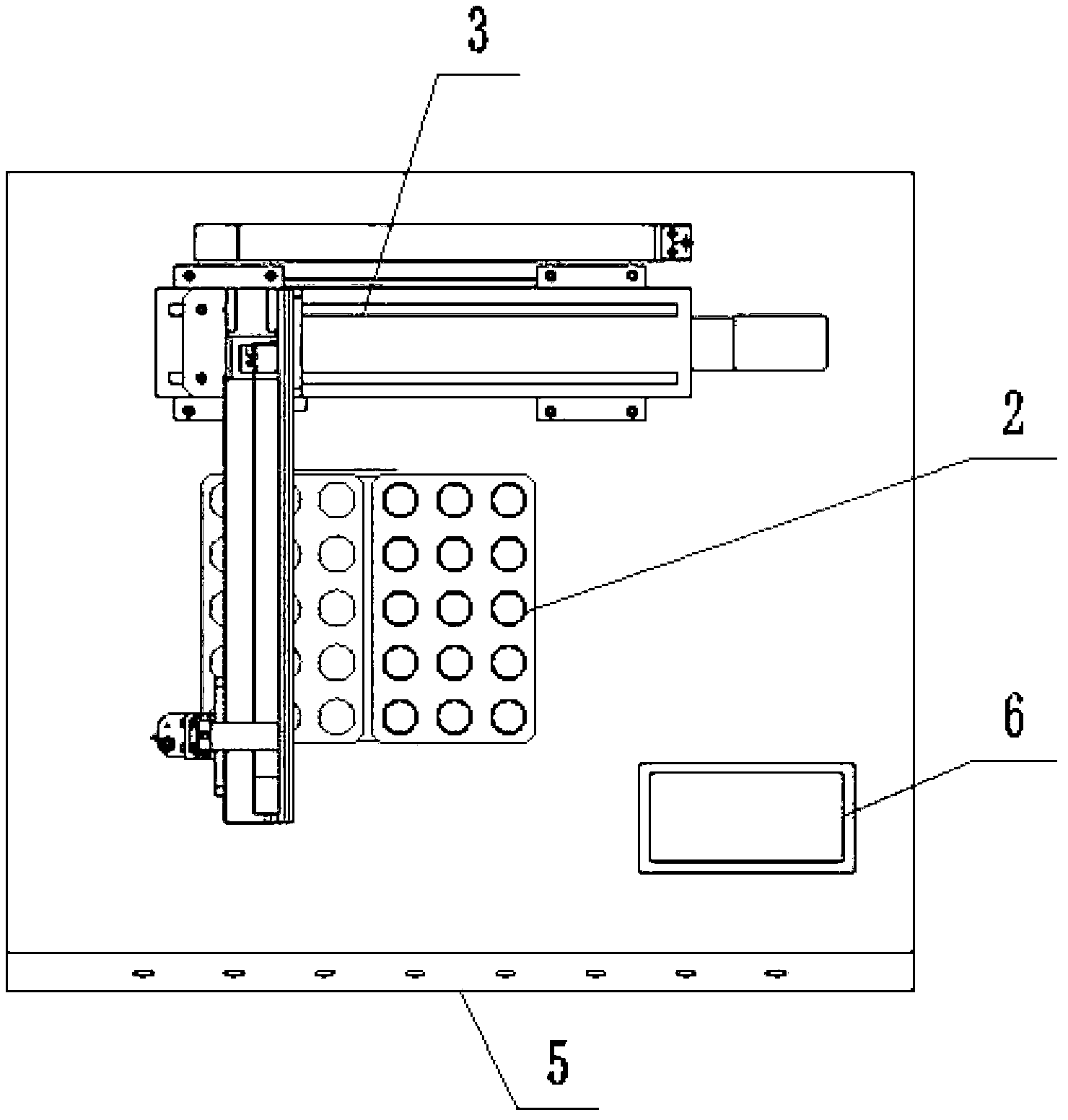
[0022] Such as figure 1 and figure 2 As shown, a three-degree-of-freedom table tennis handling manipulator includes a table tennis workpiece support 2 and a three-degree-of-freedom rectangular coordinate robot 3 on the test bench 1, the experimental bench 1 table top, and also includes a rectangular coordinate robot 3 for controlling the three-degree-of-freedom robot. The control system 4 of the robot 3, the test bench 1 is built with aluminum profiles, the bottom of which is equipped with feet and rollers, which is convenient for experimentation and transportation, and the front end of the test bench 1 is equipped with a control operation panel 5, and the control operation panel 5 is provided with an operation panel 5. Buttons and indicator lights, the control system 4 is in the form of a sheet metal hanging board, and a Mitsubishi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More