Combined estimation method of pulsar navigation position and speed
A technology of pulsar navigation and joint estimation, which is applied in the field of spacecraft navigation, can solve problems such as large amount of calculation, and achieve the effect of high positioning and constant speed accuracy and reduced calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The technical solution of the present invention will be described in detail below in conjunction with the drawings and embodiments. The technical scheme can adopt computer software technology to automatically run the process.
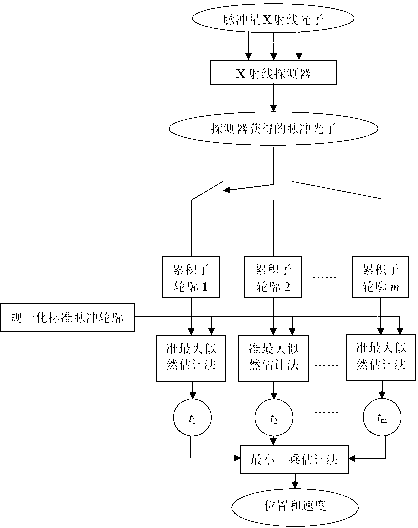
[0025] The embodiment uses the Crab Nebula pulsar as a navigation pulsar, see figure 1 , the process of the embodiment includes the following steps:
[0026] Step 1: The embodiment uses an X-ray detector to collect pulsar X-ray photons, and the observation time interval corresponding to the pulse photon sequence obtained by the detector is segmented in the following manner. Total observation time interval (t 0 , t f ) is divided into m equal observation subintervals (t 0 +(i-1)T obs / m,t 0 +i·T obs / m), i=1,2...m, where, t 0 is the observation start time, t f is the observation end time, and the observation time is T obs =t f t 0 . Set t in the embodiment 0 =0s,t f =300s, m=30.
[0027] The value of m needs to satisfy Among them...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More