

Telescopic space triple-translation parallel manipulator
A three-translation, telescopic technology, applied in the field of robots, can solve the problems of poor dynamic characteristics, high maintenance and repair costs, increased inertial mass, etc., to achieve excellent dynamic performance, easy cleaning and maintenance, and strong torque transmission capability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described in detail below in combination with specific embodiments.
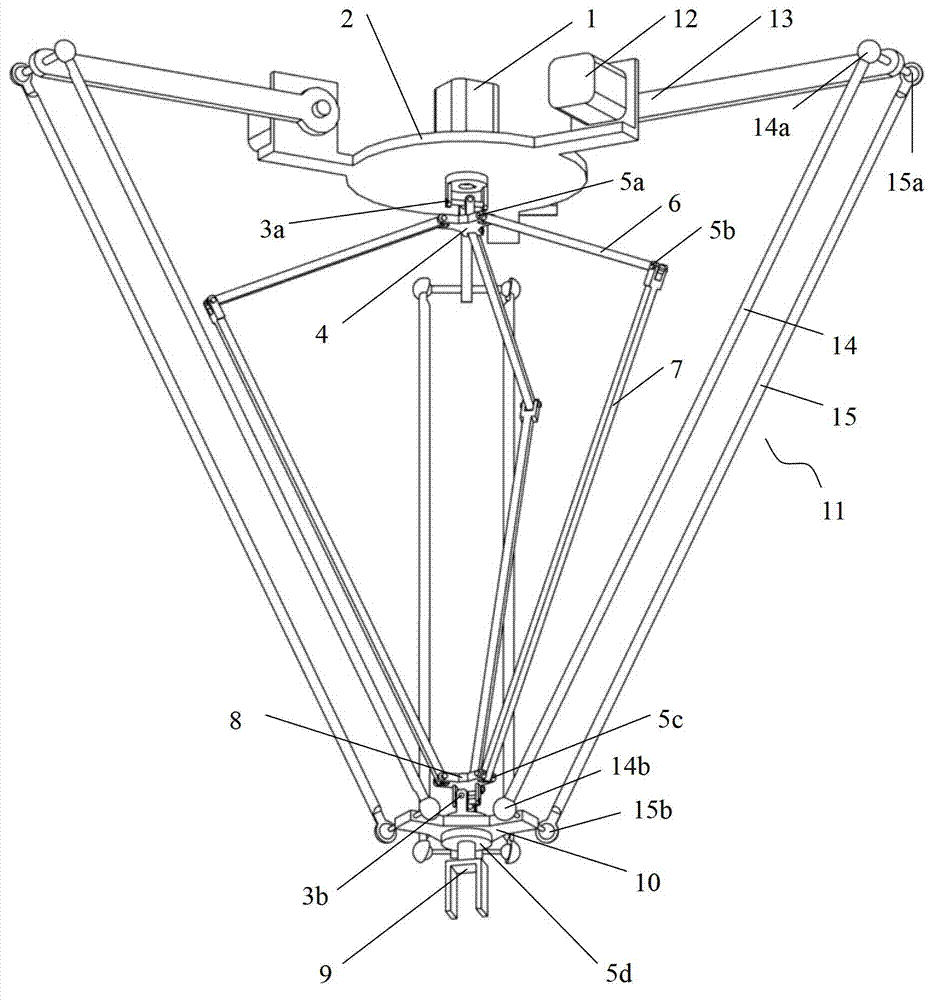
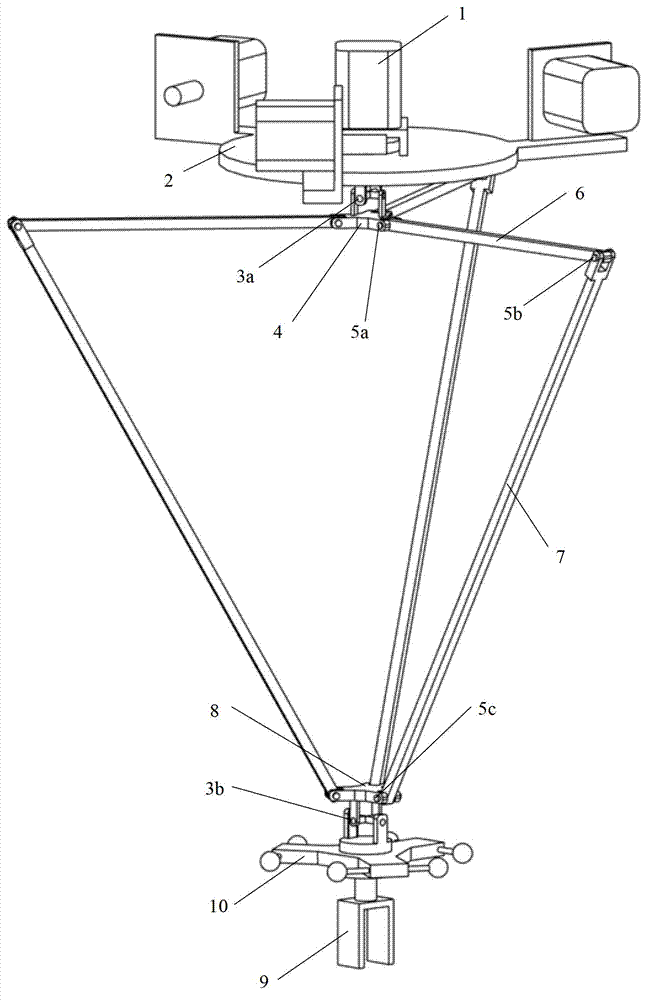
[0015] Such as figure 1 with figure 2 As shown, the telescopic space three-translation parallel manipulator of the present invention includes a space three-translation parallel mechanism and a telescopic transmission mechanism.
[0016] The three-translation parallel mechanism in space includes a fixed frame 2, a moving platform 10, and three first branch chains 11 with the same structure symmetrically arranged between the fixed frame 2 and the moving platform 10; each first branch chain 11 By the first driving device 12, the driving arm 13, the first connecting rod 14 and the second connecting rod 15 and the four balls used to connect the driving arm 13, the first connecting rod 14, the second connecting rod 15 and the moving platform 10 in sequence pair 14a, 15a, 14b, 15b, that is, the driving arm 13 is connected with the first connecting rod 14 through the b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More