

Automatic switching control method for decentralization and centralization of mobile manipulators
A mobile manipulator, autonomous switching technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of strong coupling, kinematic redundancy, control accuracy and real-time performance and other performance indicators cannot be guaranteed and cannot be suitable. Select problems such as decentralized control and centralized control to achieve the effect of high control accuracy and strong operation ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
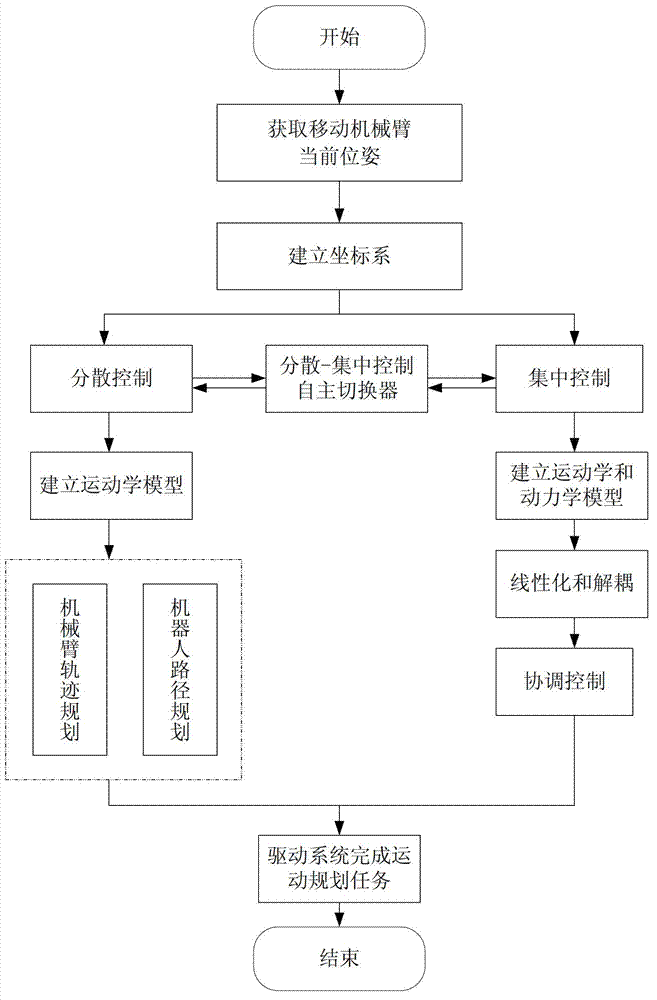
[0025] The decentralized centralized autonomous switching control method of the mobile mechanical arm implemented according to the present invention is as follows: figure 1 As shown, it mainly includes the following steps:
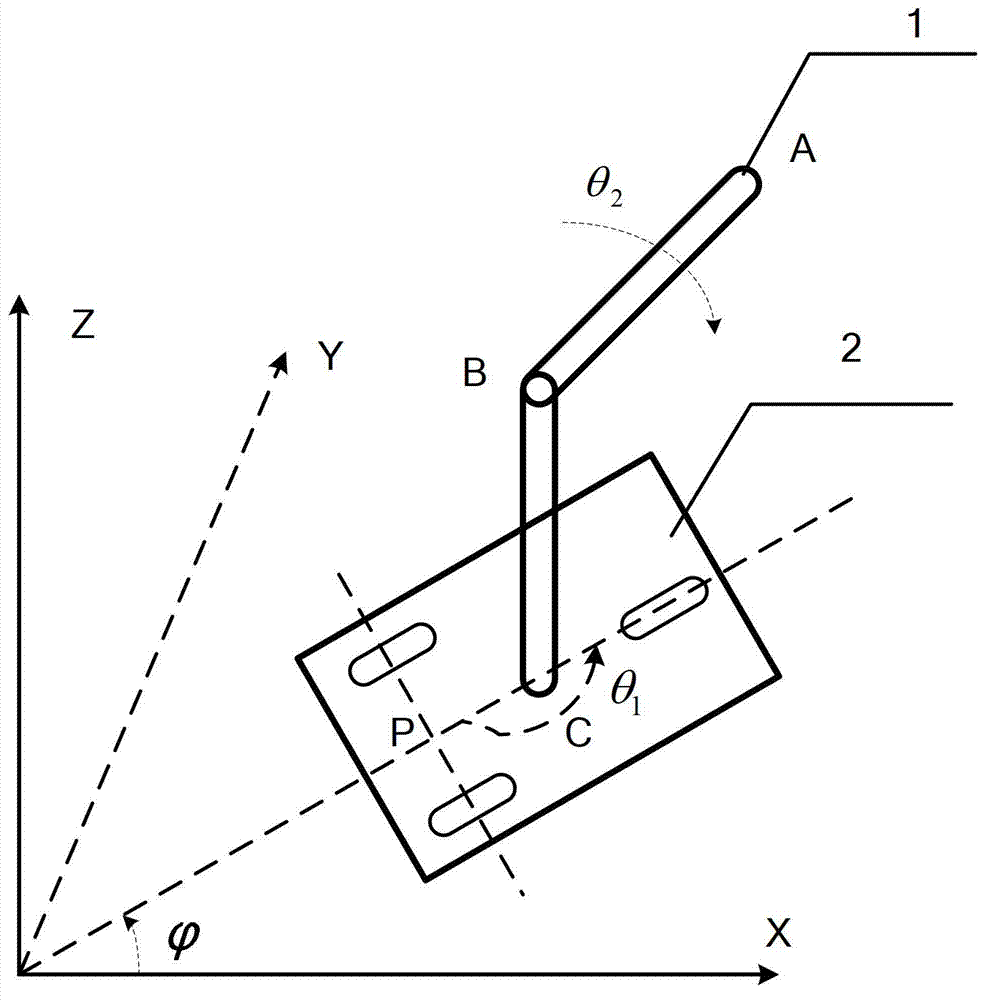
[0026] A: Establish the world coordinate system and vehicle coordinate system for the mobile manipulator, and obtain the current pose of the mobile manipulator; the current pose of the mobile manipulator is determined by the sensor device on the platform and the established coordinate system; the world coordinate system It is used to determine the position of the mobile manipulator in the world coordinates; the vehicle coordinate system is used to determine the position of the object measured by the sensor relative to the mobile manipulator during the travel of the mobile manipulator.
[0027] The world coordinate system a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More