Manipulator capable of achieving automatic fine adjustment
An automatic fine-tuning, manipulator technology, applied in the field of manipulators, can solve the problem that the manipulator cannot automatically fine-tune to adapt to the current workpiece position, etc., and achieve the effect of improving production efficiency and realizing the automation of machinery.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, and only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
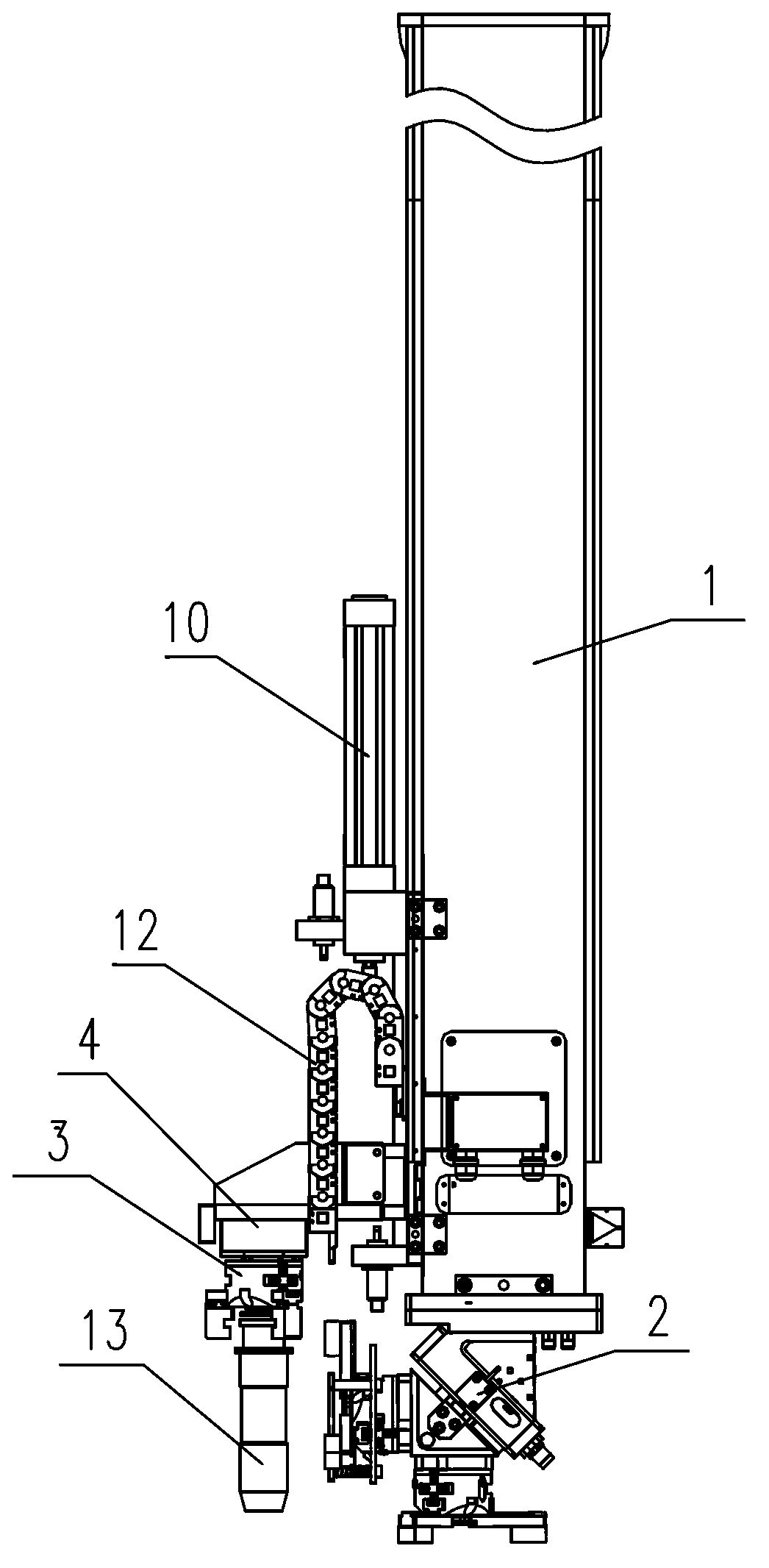
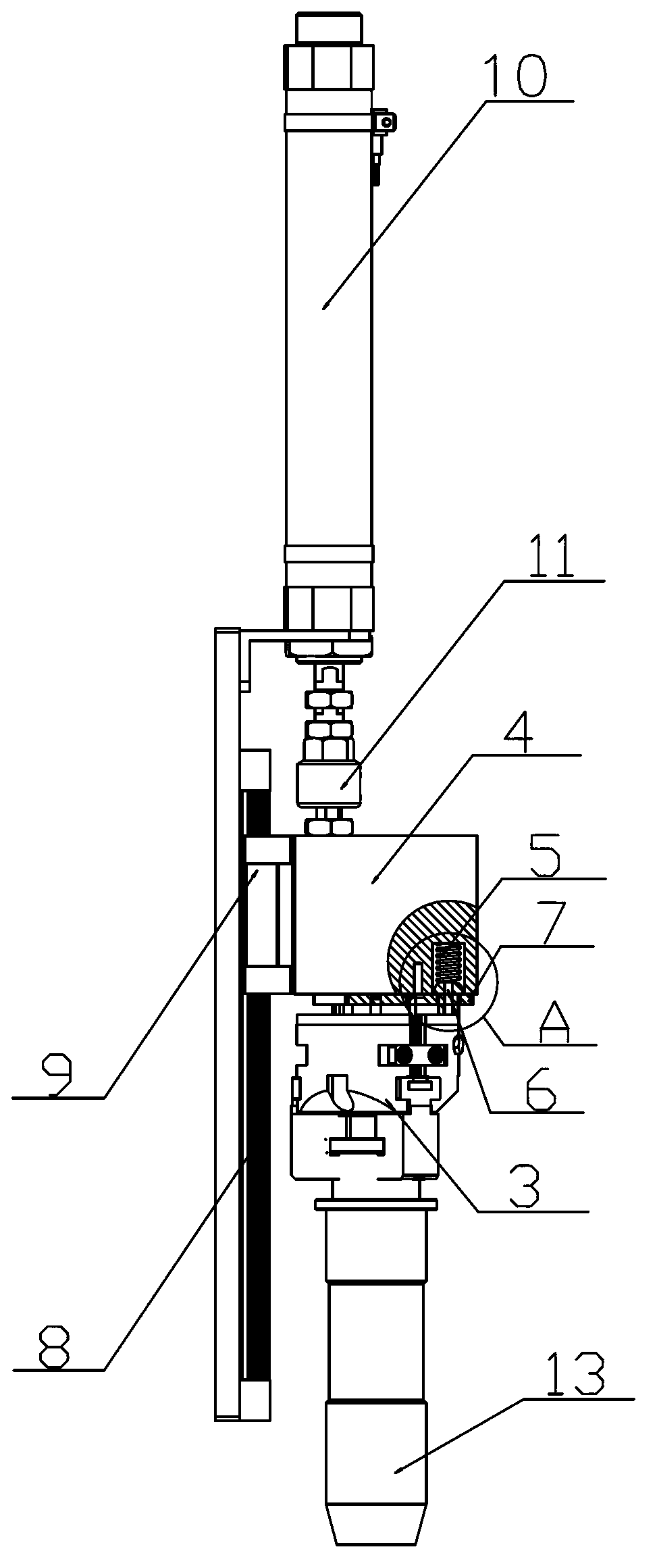
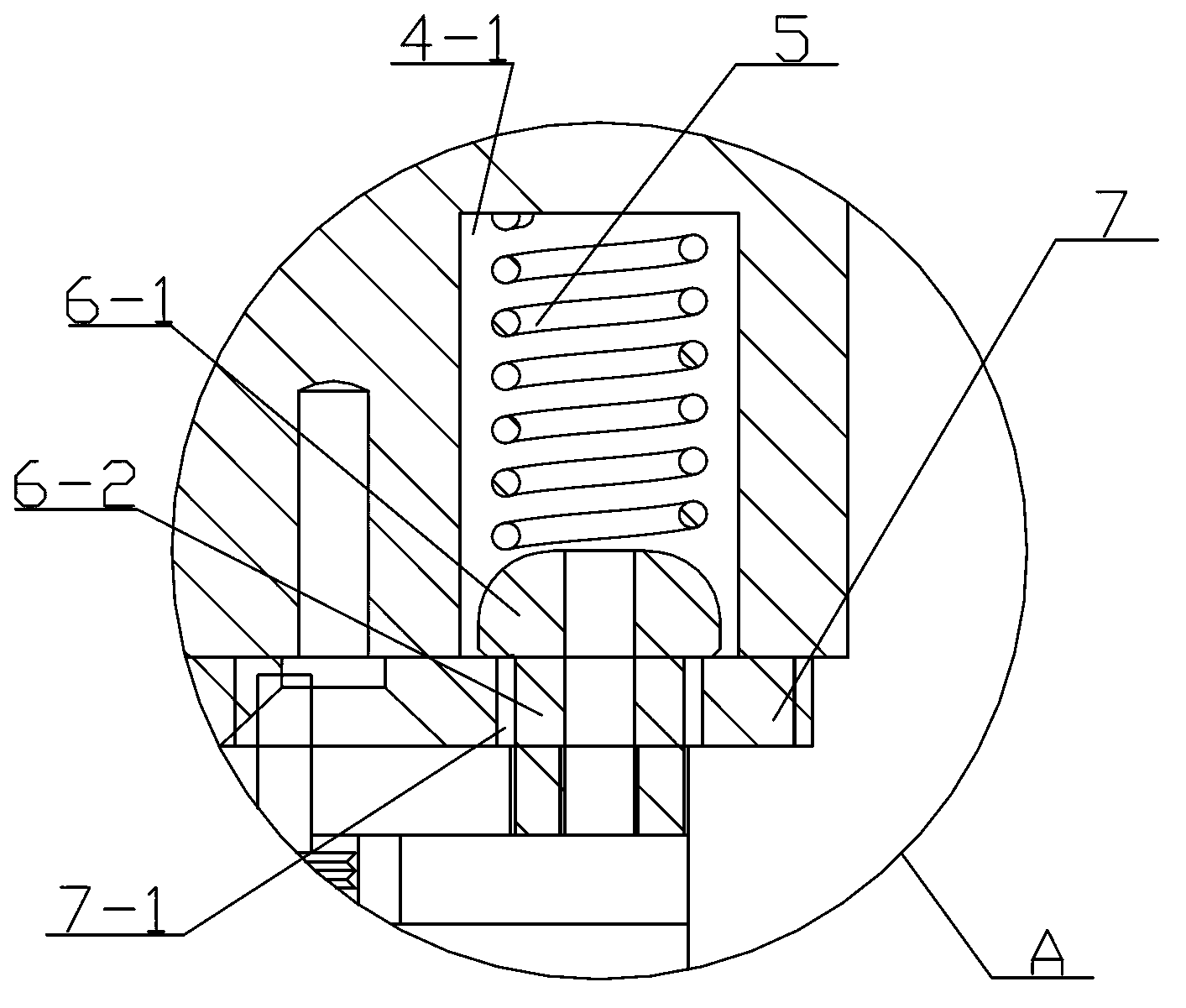
[0022] Such as Figure 1-5 As shown, the optimal embodiment of an automatic fine-tuning manipulator of the present invention has a bracket (not shown in the figure) for foundation support and a vertical beam 1 fixed on the bracket, and the vertical beam 1 is provided with a grab The hand 2 and the vertical beam 1 are also equipped with a floating gripper assembly that can fine-tune the degree of freedom of the workpiece to be grasped in cooperation with the gripper 2. The floating gripper assembly includes a floating gripper 3 and a floating block 4. The floating block 4 and the floating gripper Hand 3 is connected by three sets of evenly distributed floating c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com