Ship self-adaptive robust course tracking control method based on back stepping method
An adaptive robust tracking control technology, applied in the field of ship course tracking control, can solve problems such as unfavorable implementation, complex methods, and no consideration of model uncertainty, and achieve the effect of reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in more detail below with reference to the drawings and embodiments.
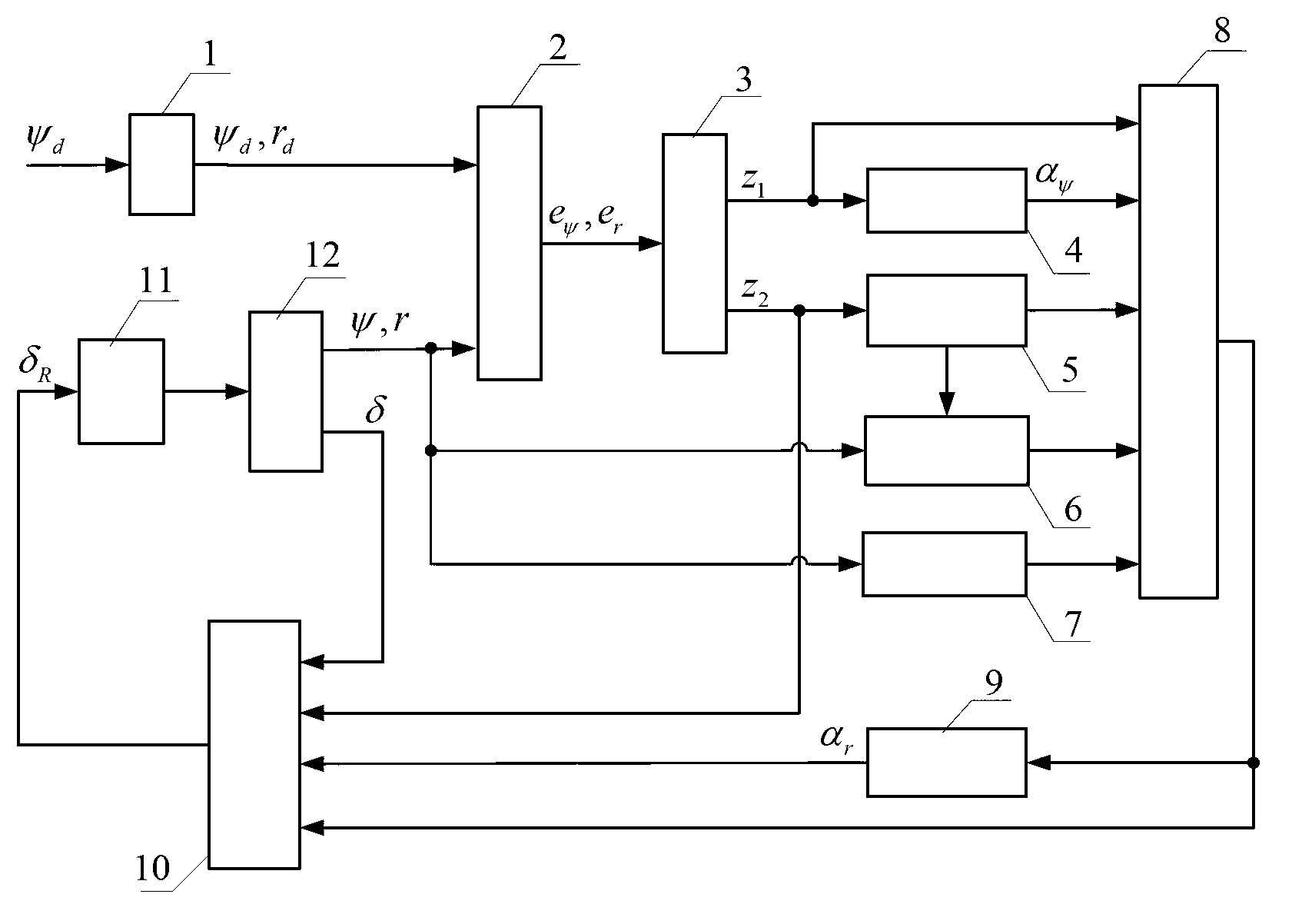
[0017] Such as figure 1 As shown, a ship adaptive robust heading tracking control system based on the backstepping method of the present invention includes a heading reference information generator 1, a tracking error equation generator 2, a diffeomorphism transformer 3, an angle virtual controller 4, Terminal sliding mode controller 5, model uncertainty item and external disturbance estimator 6, nonlinear operator 7, angular velocity expectation virtual controller 8, first-order low-pass filter 9, controller 10, surface ship 11 and sensor system 12 .
[0018] In this embodiment, a surface ship autopilot model is used for simulation verification, and its mathematical model is:
[0019] T ψ · · + H ( ψ · ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More