

Friction parameter identification method for aerial remote-sensing inertial stabilization platform
An inertial stable platform and aviation remote sensing technology, applied in navigation, instrumentation, adaptive control and other directions through speed/acceleration measurement, can solve problems such as difficult to use and inconvenient maintenance, and achieve accurate friction model, accurate friction characteristics, high Effect of Accuracy Friction Torque Compensation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
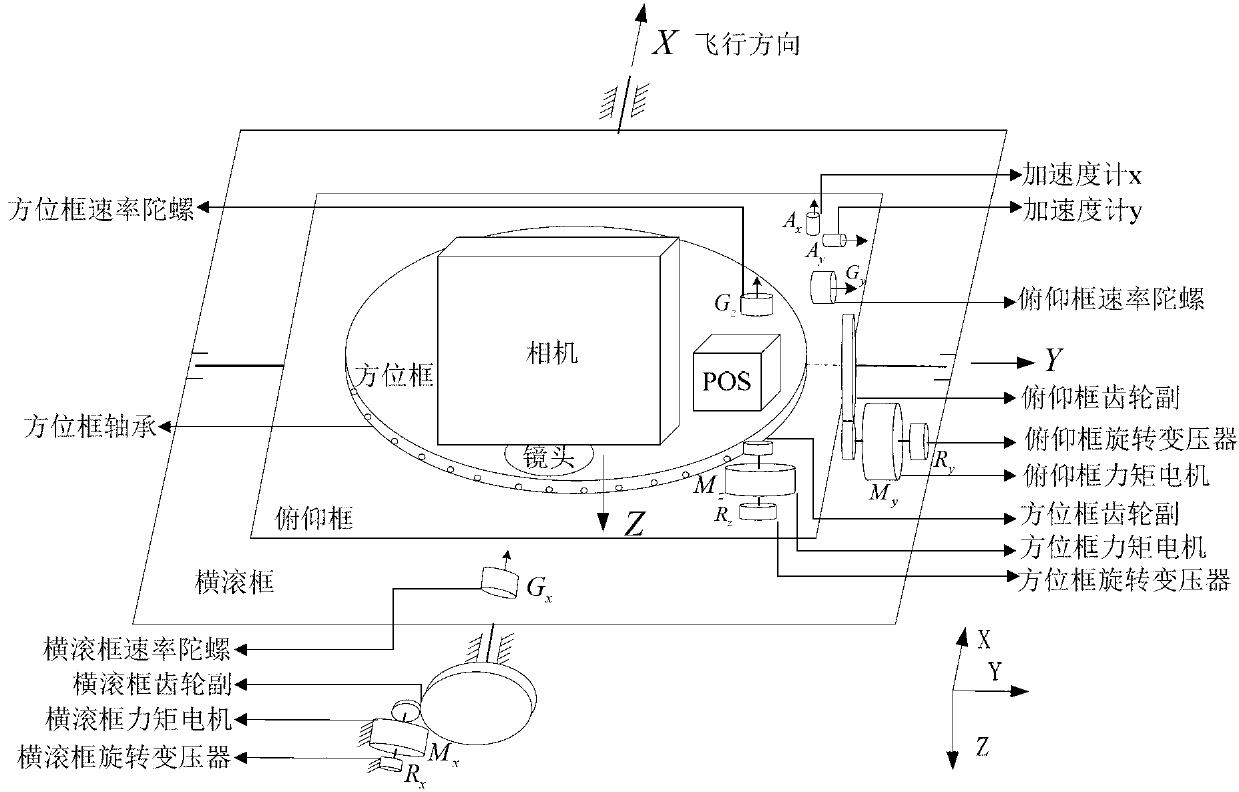
[0020] Such as figure 2 Shown is a schematic diagram of the structure of the three-axis inertial stabilization platform for aerial remote sensing. From the outside to the inside of the platform, there are roll frame, pitch frame and azimuth frame respectively. The rotation axis of the roll frame is along the flight direction, the rotation axis of the pitch frame is along the flight span direction, and the rotation axis of the azimuth frame is vertically downward, M x , M y , M z It is three torque motors, which respectively drive the rotation of the roll frame, the rotation of the pitch frame, and the rotation of the azimuth frame; G x ,G y ,G z is the rate gyroscope installed on each frame, sensitive to the rotational angular velocity of the three frames relative to the inertial space, A x , A y is the accelerometer installed on the pitch frame, where A x The sensitive axis of A is coincident with the rotation axis of the roll frame, A y The sensitive axis coincides ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More