

Method for correction of underwater robot position error with single acoustic beacon
An underwater robot and acoustic beacon technology, which is applied in the re-radiation of sound waves, instruments, measuring devices, etc., can solve the problems of position error correction failure, incorrect correction results, and inability to guarantee position errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
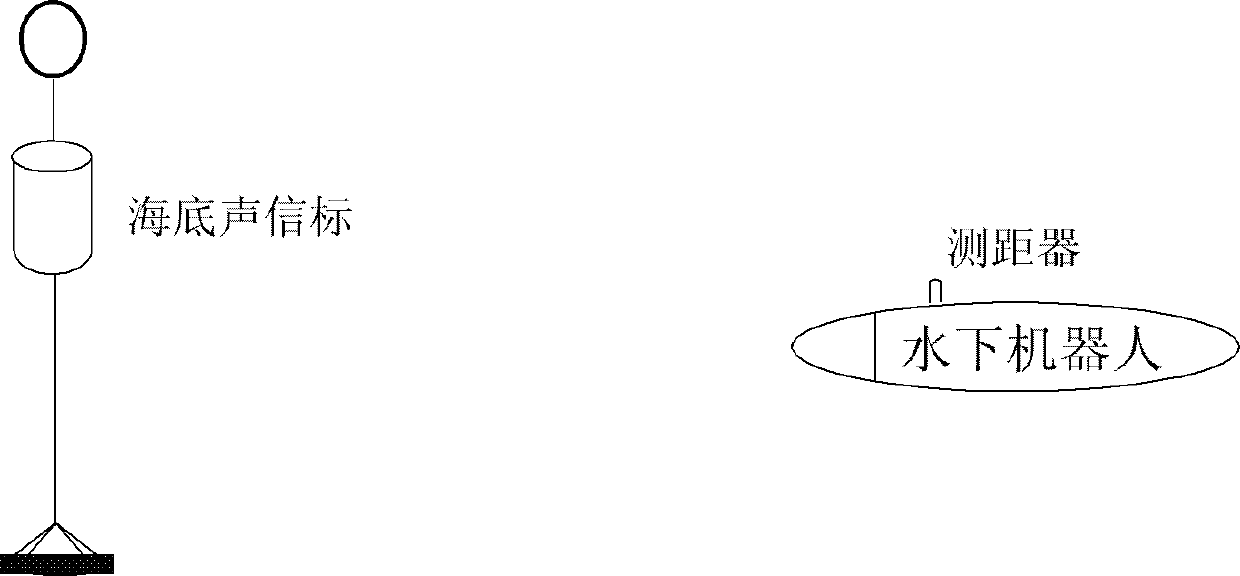
[0044] A device for correcting the position error of an underwater robot with a single acoustic beacon, such as figure 1 As shown, it consists of an acoustic beacon and a range finder installed on the underwater robot.
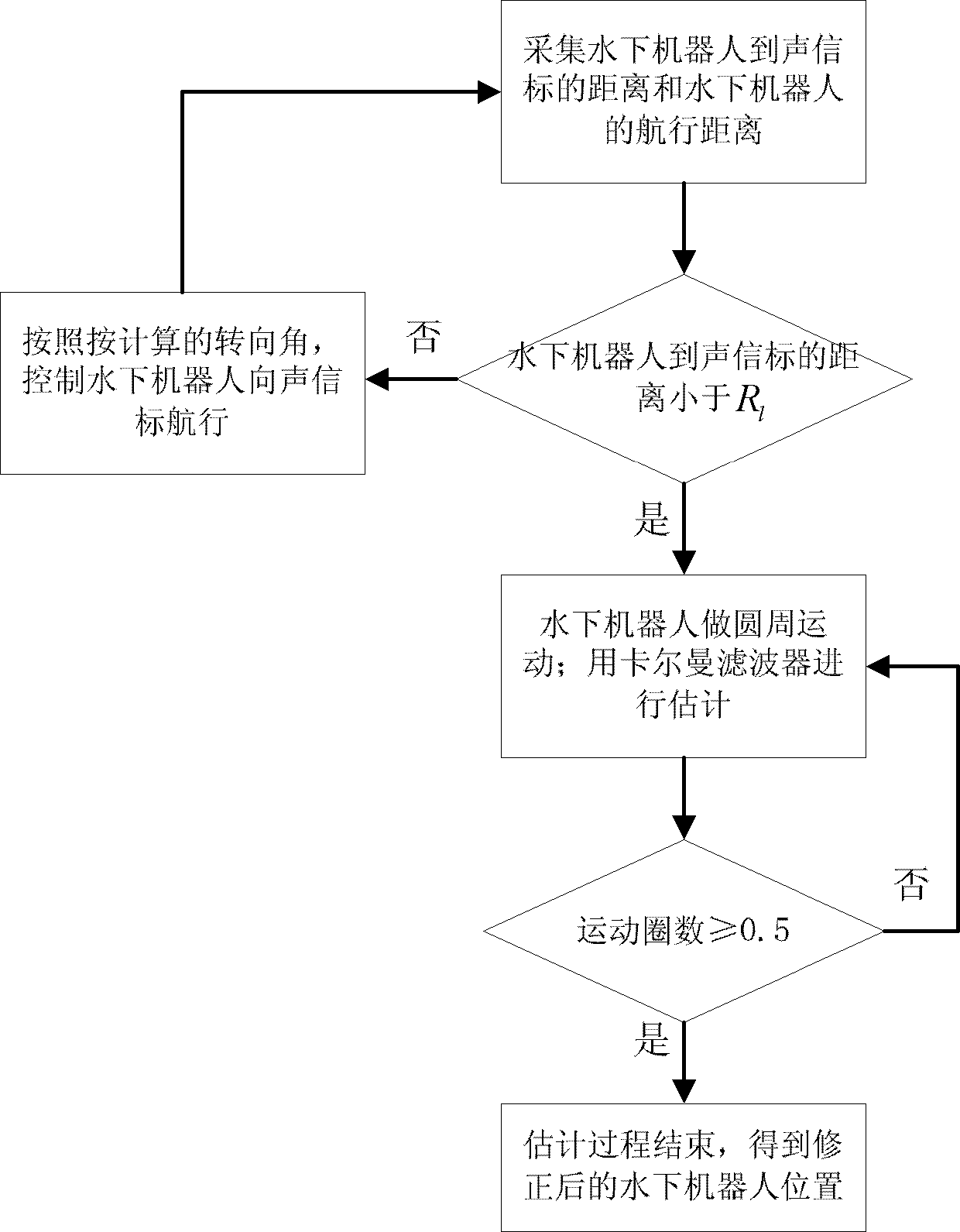
[0045] The method flow chart of the present invention is as figure 2 As shown, the rangefinder of the underwater robot periodically collects the distance between the moving underwater robot and the acoustic beacon; Sailing distance, calculate the steering angle of the underwater robot, and control the underwater robot to sail to the acoustic beacon; when the distance between the underwater robot and the acoustic beacon is reduced to the set value R l When , the underwater robot turns to move around the acoustic beacon; according to the heading, speed of the underwater robot and the collected distance between the underwater ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More