

Iteration SKF (Schmidt Kalman Filter) method of multi-source information integrated navigation of Mars power descent stage
A technology of dynamic descent and integrated navigation, which is applied in navigation calculation tools and other directions, and can solve problems such as constant position error, failure to meet real-time requirements, and poor estimation effect of gyroscope and accelerometer.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0098] The present invention will be described in detail below in conjunction with the accompanying drawings.
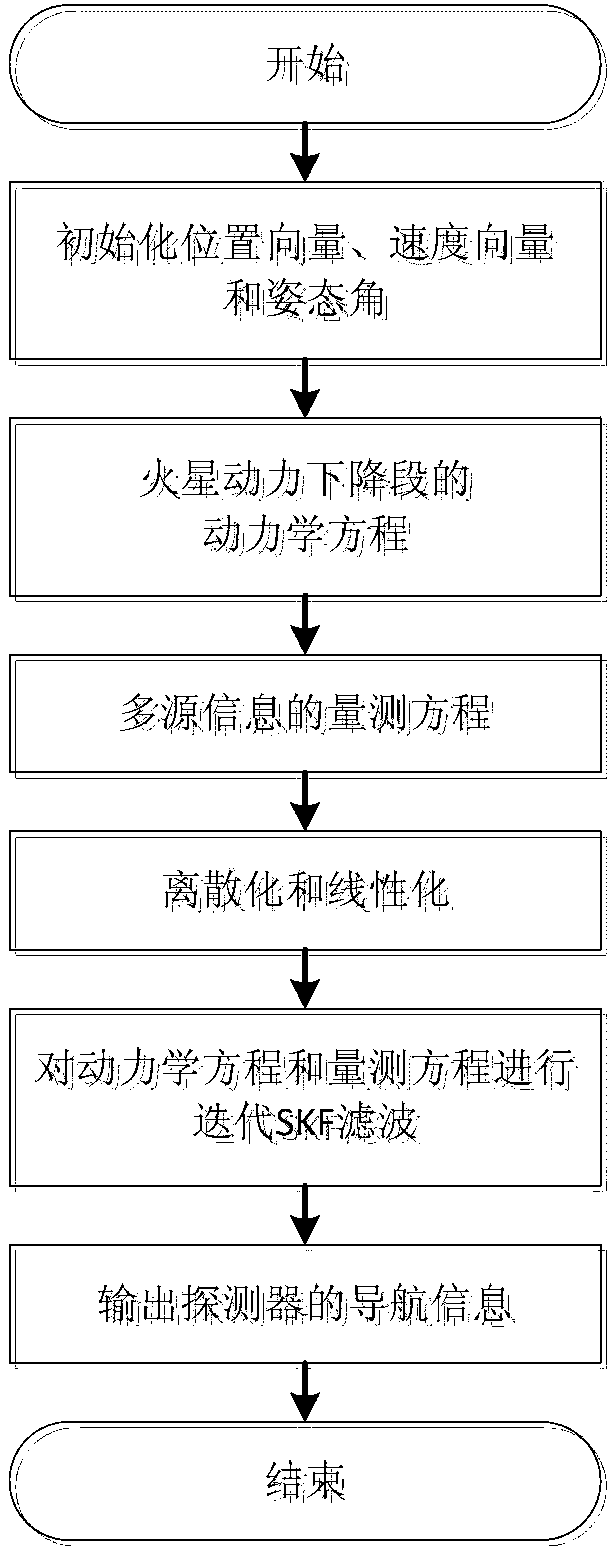
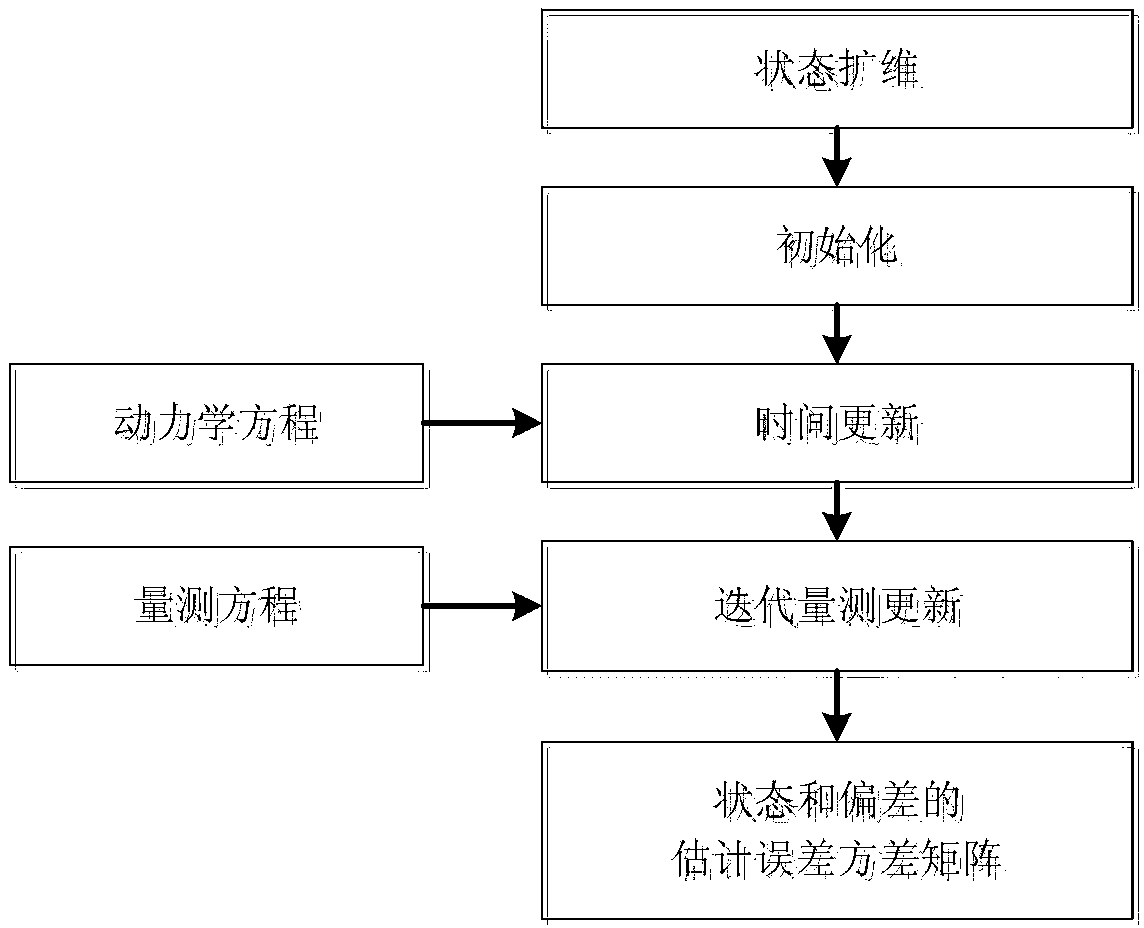
[0099] The present invention is an iterative SKF method for combined navigation of multi-source information in the Mars power descent segment, and its calculation flow chart is as follows figure 1 The schematic diagram of the shown and iterative SKF filtering algorithm is shown in figure 2 As shown, it includes the following four steps:
[0100] Step 1. Kinetic equation of Mars power descent section
[0101] The situation of the Mars power descent section is relatively complicated, and it is very difficult to establish an accurate dynamic model. On the basis of considering the IMU output, use it to construct the dynamic equation of the power descent section:
[0102] r · = v
[0103] v · = C b i ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More