

Six-rod self-adaptive tracked robot
A crawler robot and self-adaptive technology, applied in crawler vehicles, motor vehicles, transportation and packaging, etc., can solve problems such as complex control, and achieve the effects of simple control mechanism, good shock absorption effect, and good mechanical stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
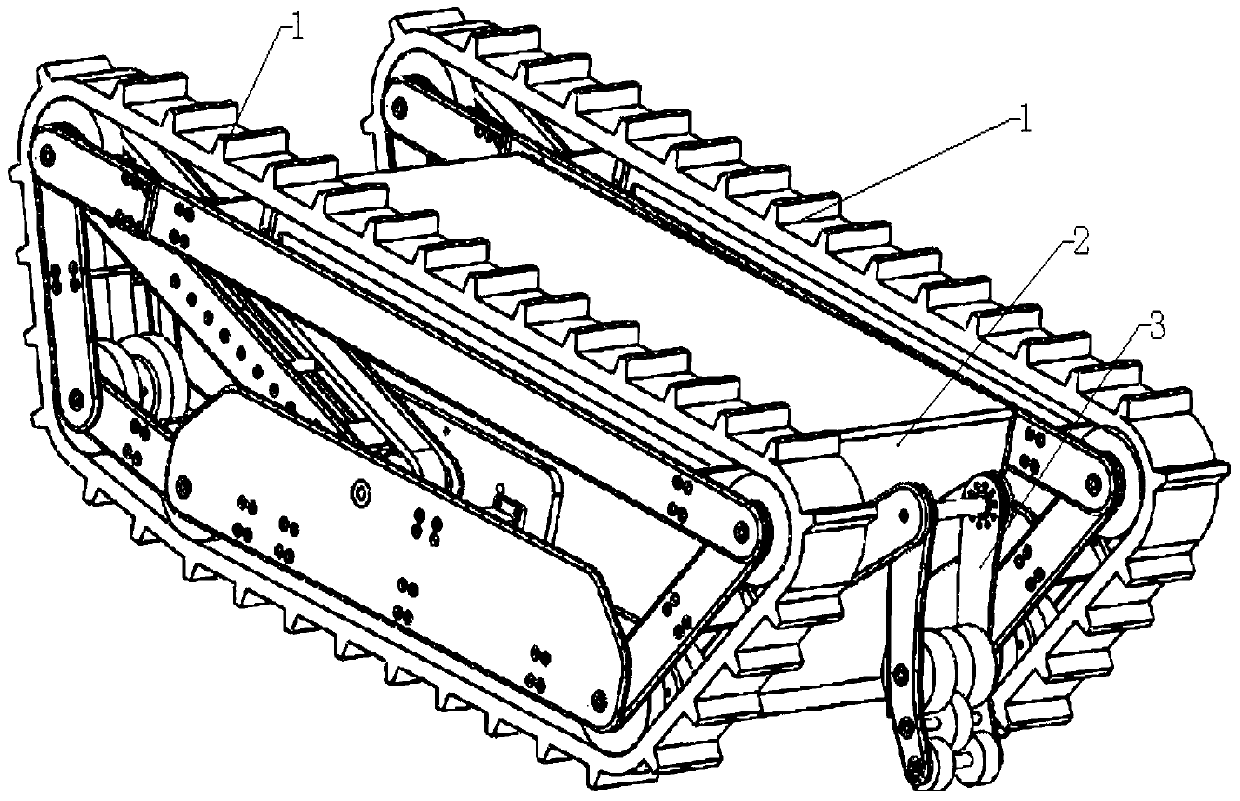
[0032] Further explain the present invention below in conjunction with accompanying drawing.
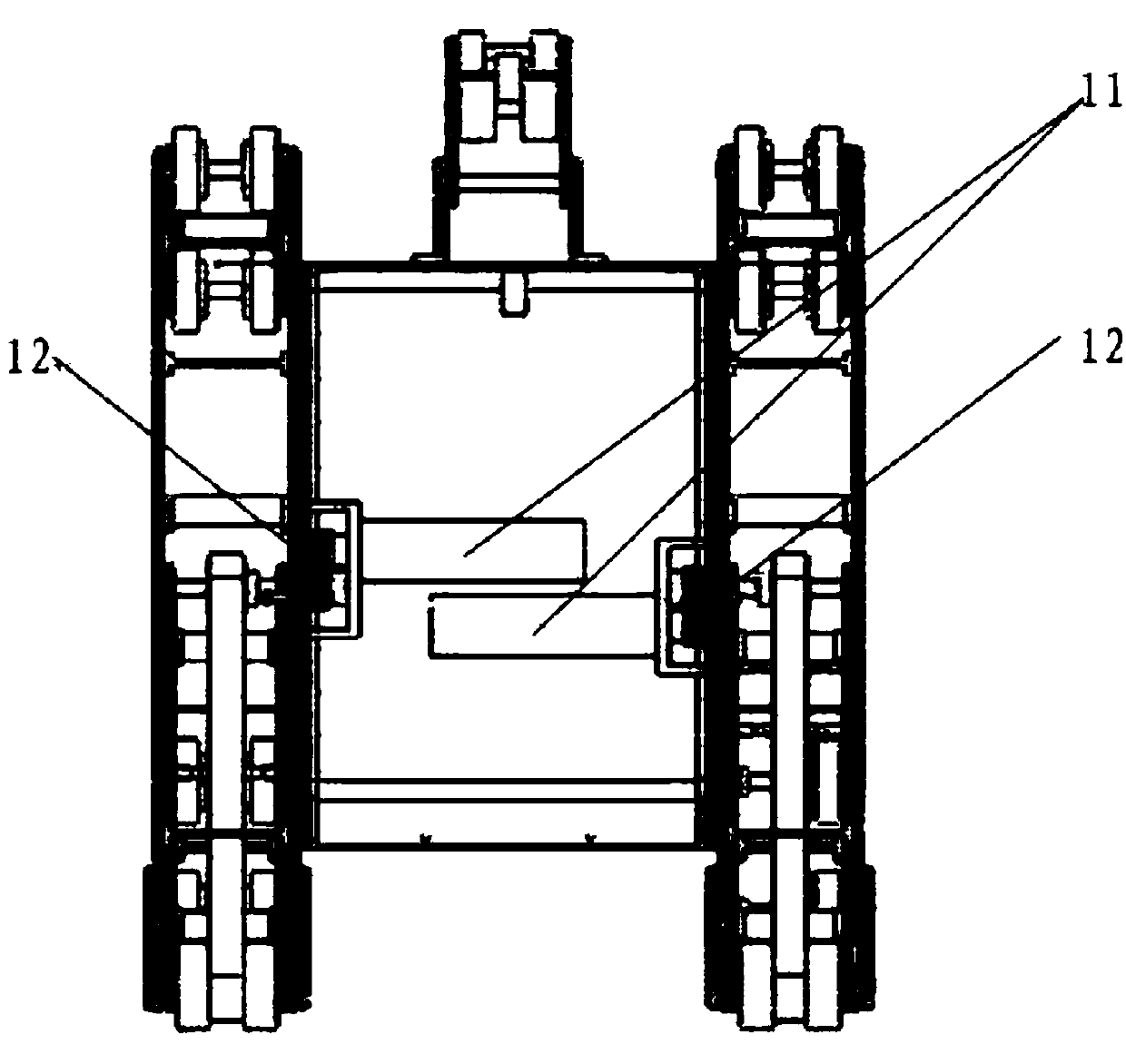
[0033] The six-bar self-adaptive crawler robot of the present invention comprises a crawler belt 1, a timing belt pulley A13, a timing belt pulley B14 engaged with the crawler belt 1, a timing belt pulley C15, a timing belt pulley D16, a timing belt pulley E17, and a timing belt pulley F18 , car body 2, the middle part of car body 2 is provided with driving motor 11, tail wheel 3, crawler belt is arranged on both sides of car body, wherein, the axle of synchronous belt pulley A13 and the output shaft of driving motor 11 mesh through gear 12, synchronous belt pulley A synchronous belt 19 is provided between A13 and the synchronous pulley C15.
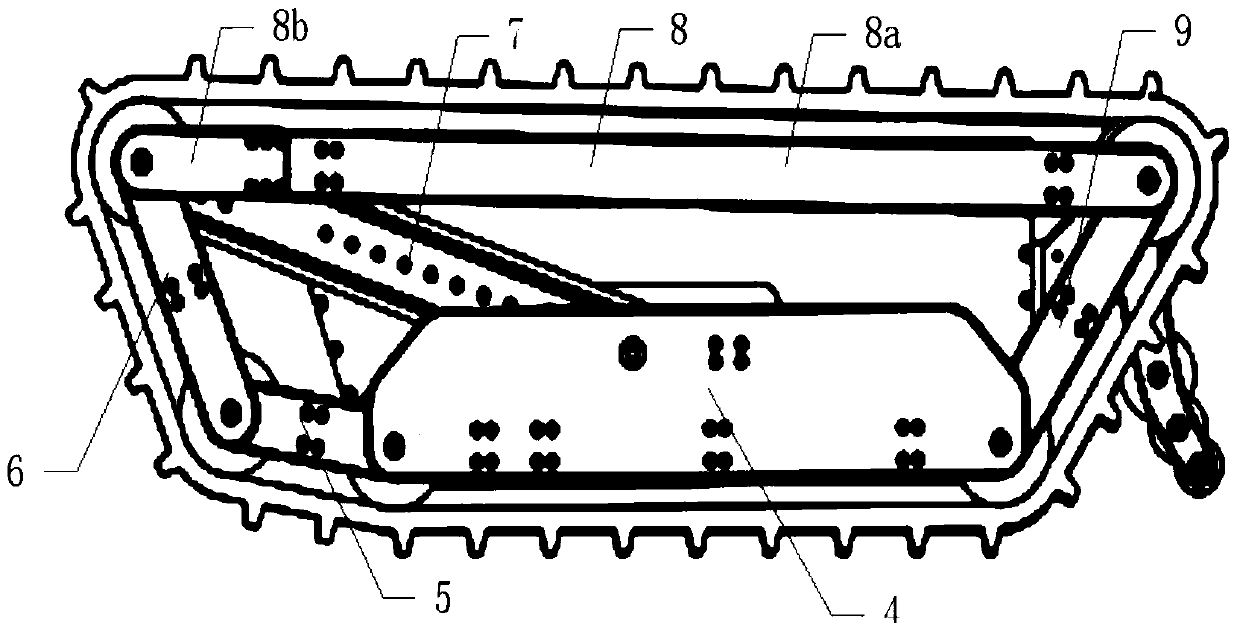
[0034] The crawler belt 1 is supported by two symmetrically arranged six-bar linkage mechanisms. The six-bar linkage mechanism is composed of the frame 4, the front lower arm 5, the front upper arm 6, the main arm 7, the main arm 8, and the re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More