

A Multi-UAV Cooperative Search Method Based on Gaussian Distribution Prediction
A multi-UAV, Gaussian distribution technology, applied in the control, instrument, adaptive control and other directions of finding targets, which can solve problems such as difficult tasks and collaborative search of less moving targets.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0074] A method of multi-UAV cooperative search for multiple moving targets based on Gaussian distribution prediction is to assume that there are N v UAVs of the same type, N t moving targets of the same type; N v , N t are all positive integers; UAV utilizes airborne sensors to search for moving targets; in this embodiment, it is assumed that there are N v = 4 drones, the initial points are respectively located at the four vertices of the circumscribed square of the mission area R; there are N t = 10 moving targets with unknown initial positions and headings.
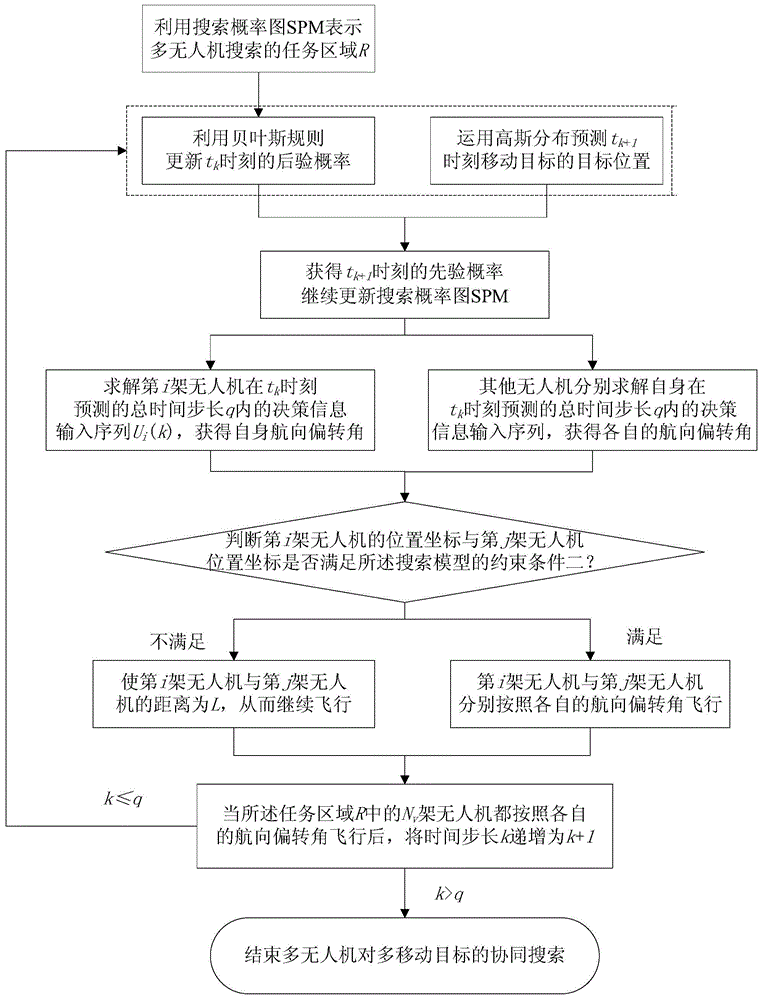
[0075] see figure 2 , the process of the present invention mainly includes the following steps:
[0076] Step 1: Use the search probability map SPM to represent the task area R for multi-UAV search;
[0077] Divide the circumscribed square of the task region R into N c A square grid of the same size, use n to represent the nth square grid, n=1,2,...,N c , N c is a positive integer; the coordinates of the cent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More