

Method for obtaining image depth information
A technology for obtaining depth information and images, which is applied in the field of computer vision, can solve the problems of limited accuracy of depth maps, and achieve the effects of smooth depth maps, compatibility with boundary discontinuities, and suppression of noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0013] The present invention will be described in further detail below in combination with specific embodiments and with reference to the accompanying drawings.
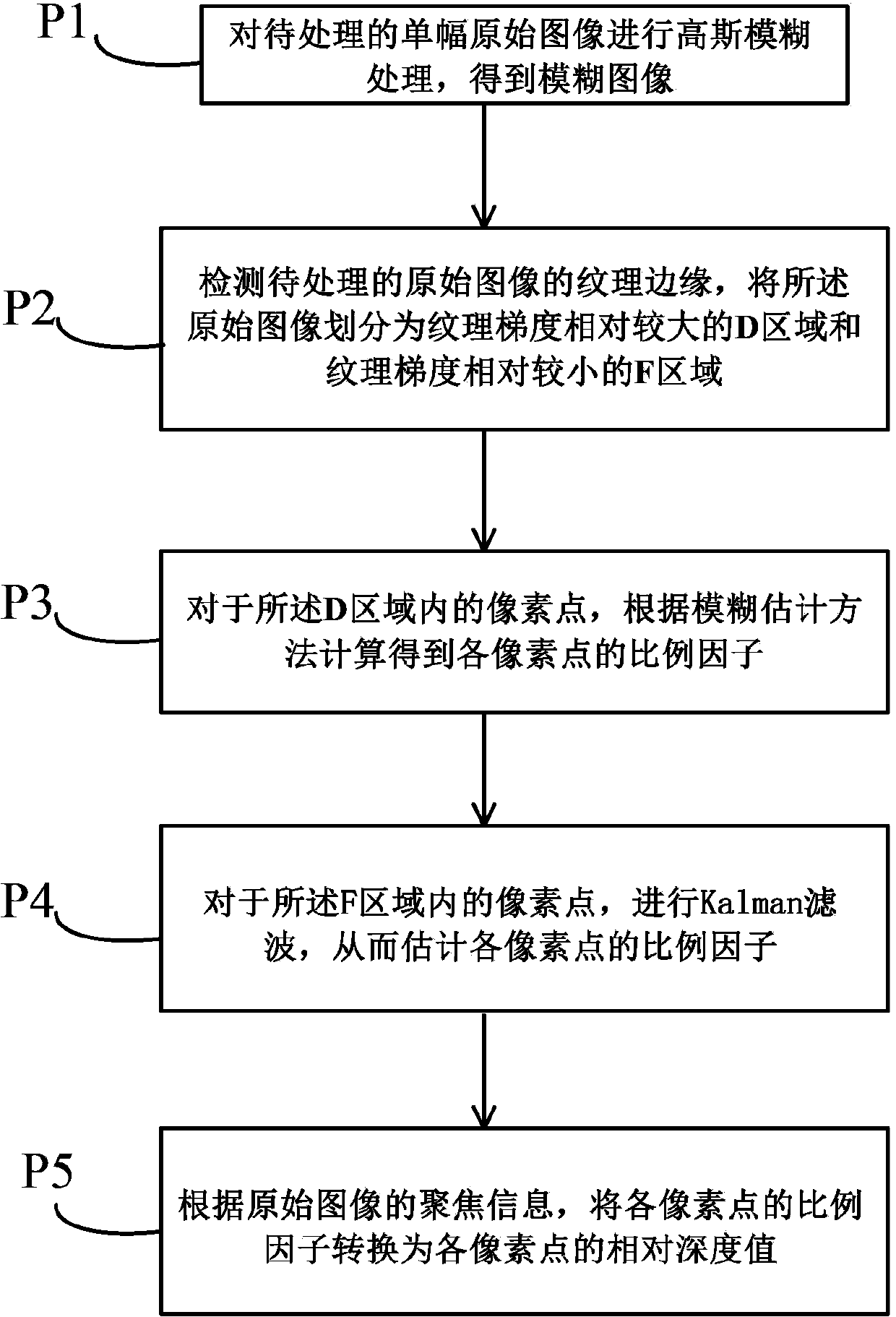
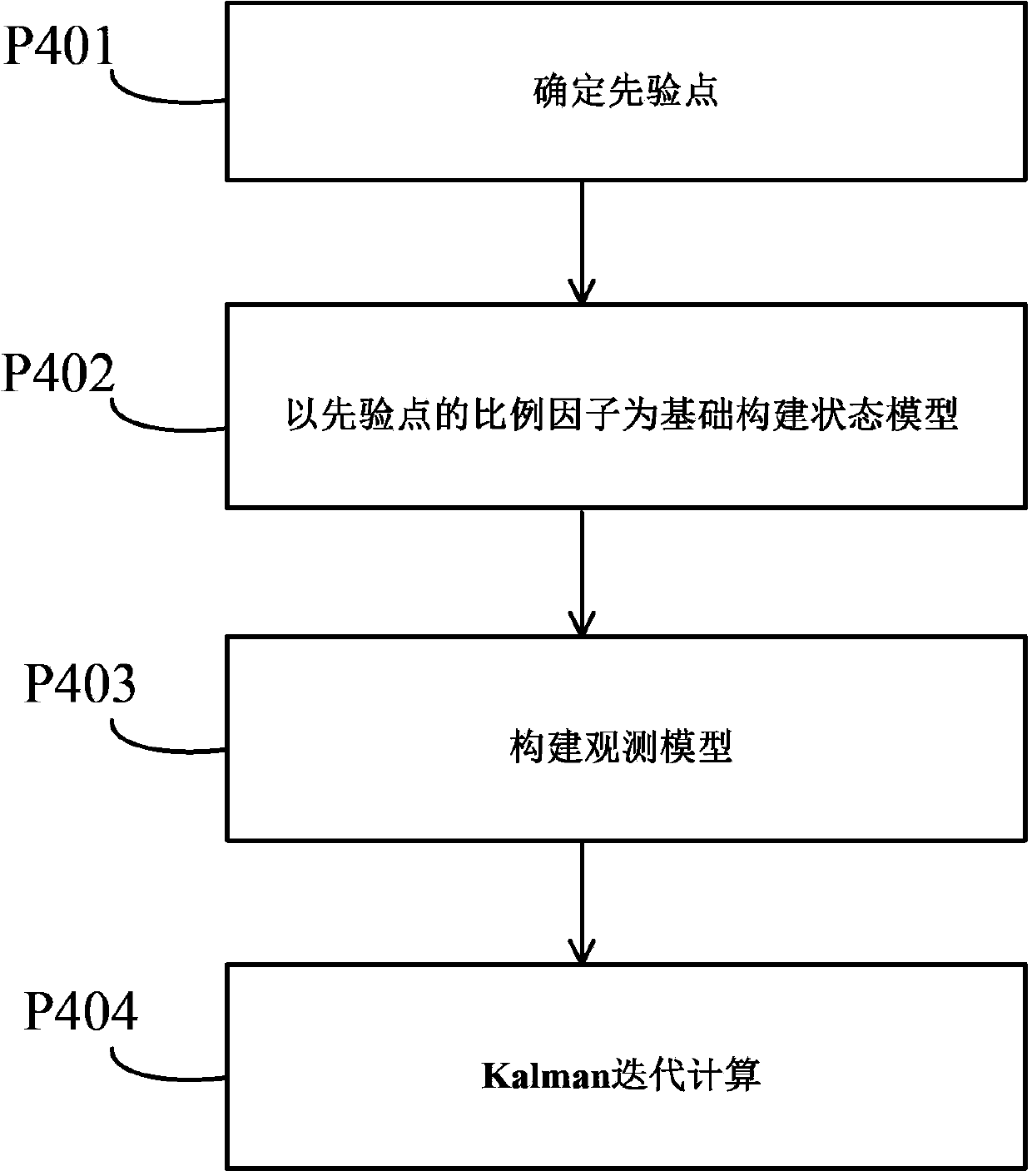
[0014] The present invention improves the conventional single image defocusing method to obtain the depth map, innovatively introduces the idea of Kalman filtering, takes the relative depth of each point in the image as the state, and takes the ratio between the original image gradient and the blurred image gradient as the Observation, build the state model and observation model, and finally perform Kalman iterative calculation, use the Kalman filter method to predict the state value from the prior model and the observed value, and filter the state value. That is, through the prediction-correction-re-prediction method of Kalman filtering, the noise of the obtained depth map is effectively suppressed, thereby suppressing the noise of the depth value obtained by the defocusing method, and improving the accuracy of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More