Double-foot leg four-bar linkage humanoid robot
A humanoid robot and four-link technology, applied in the field of robotics, can solve the problems of wasteful control lines of steering gear, inconvenient maintenance of robots, complex structure, etc., and achieve the effect of avoiding confusion of control lines, simple structure, and wide space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
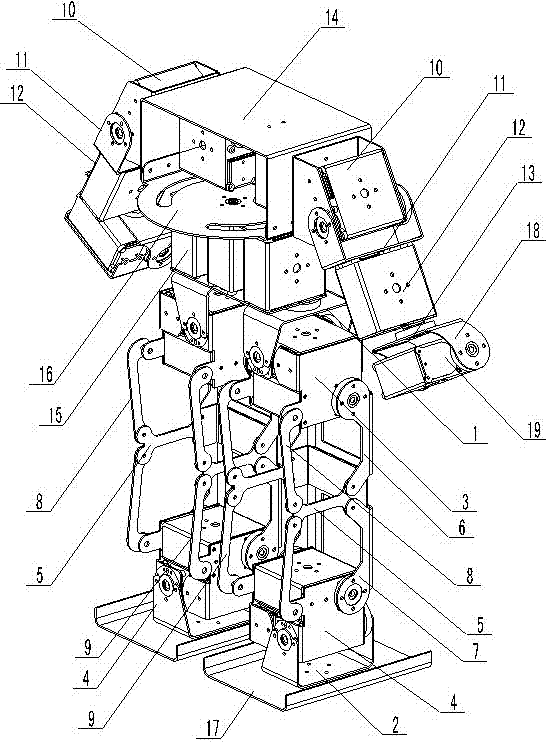
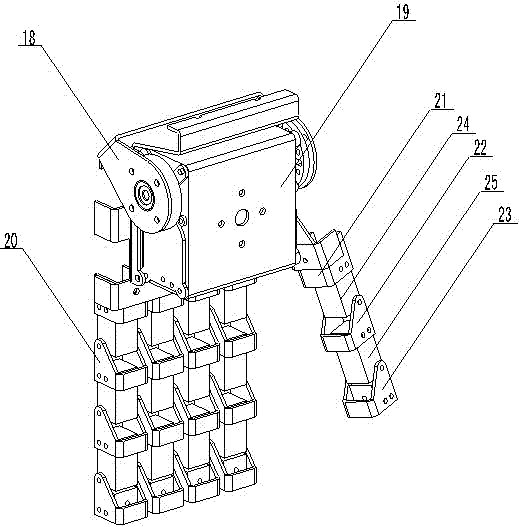
[0015] Specific implementation mode one: combine figure 1 and figure 2 Describe this embodiment, this embodiment comprises left arm, right arm, trunk mechanism, left leg, right leg, left foot and right foot, left arm and right arm are respectively rotatably arranged on the left and right sides of the upper part of trunk mechanism, left leg and right The legs are respectively rotatably arranged on the left and right sides of the lower end of the trunk mechanism, and the left foot and the right foot are respectively arranged on the lower ends of the left leg and the right leg. The structure of the left leg and the right leg is the same. Rod support 1, the second four-link support 2, the first steering gear 3, the second steering gear 4, the common connecting rod 5, the first connecting rod frame 6, the second connecting rod frame 7, two first connecting rods The rod frame 8 and the two second link frames 9, the first four-link support 1 and the second four-link support 2 are a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com