

Monocular stereo vision relative position/pose measuring method
A technology of relative pose and stereo vision, applied in the field of visual measurement, can solve the problems of inaccurate measurement of the target depth of field calibration, large volume, high cost, etc., and achieve the effect of low cost, small volume, and simple calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The following is a detailed description of the embodiments of the present invention: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operation processes. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
[0038] Please also see figure 1 and figure 2 .
[0039] The present embodiment provides a monocular stereo vision relative pose measurement method, comprising the following steps:
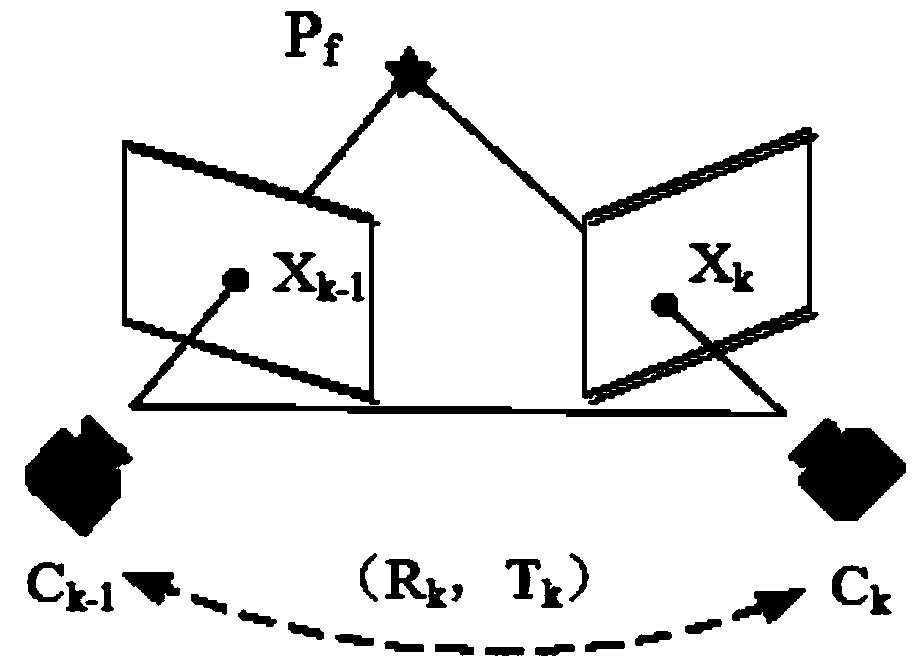
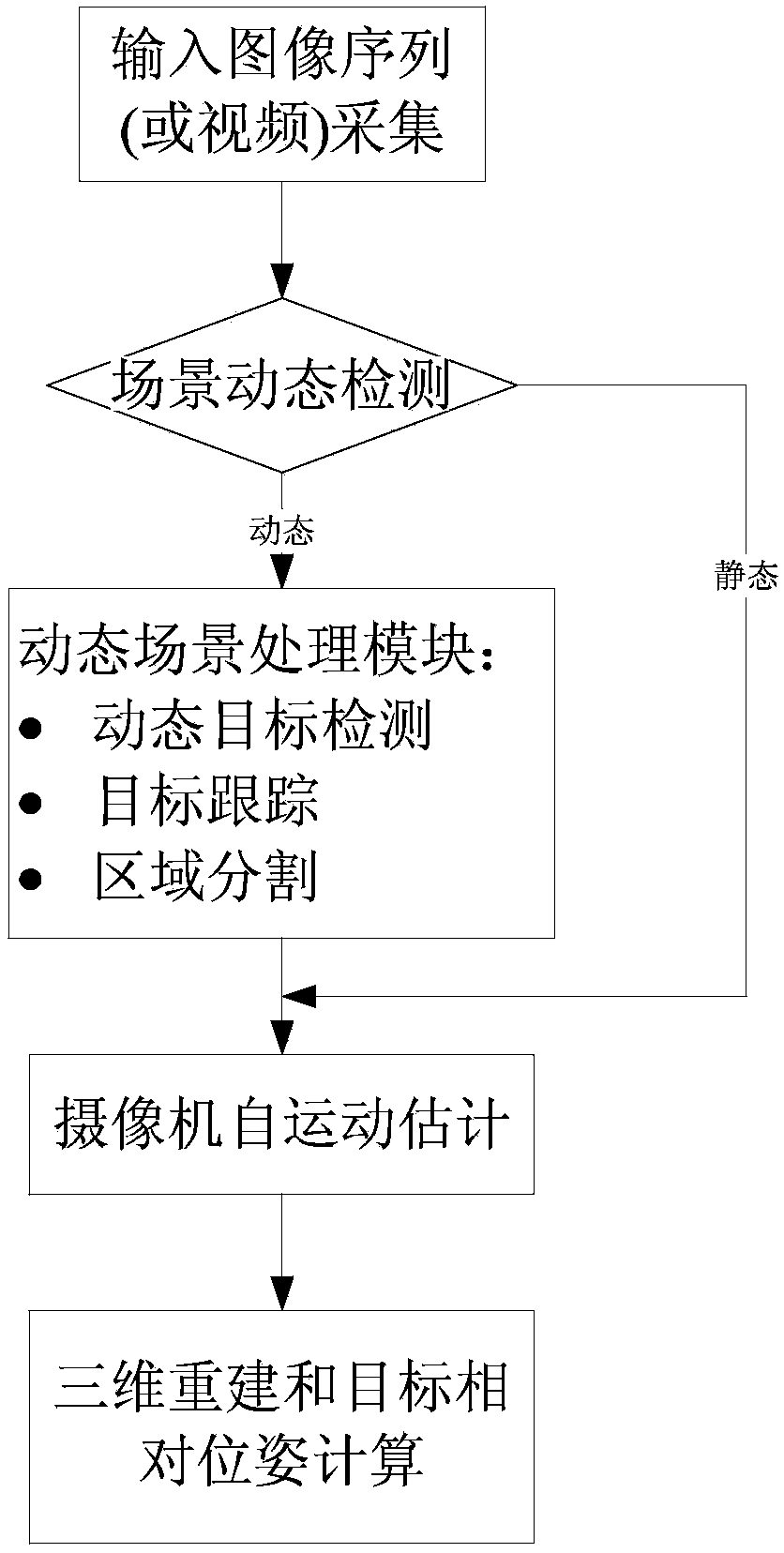
[0040] Step S1: install the monocular camera on the movable device, image the target at different positions by moving the monocular camera, and obtain an image sequence containing the target;
[0041] Step S2: Perform target detection and scene dynamic analysis on each image. If the target is moving in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More