Flow regulating valve
A flow control valve and valve body technology, applied in valve details, multi-port valves, valve devices, etc., can solve the problems of inability to control the flow of the primary and secondary circuits, troublesome maintenance and replacement of parts, and large space occupation. Small footprint, extended service life, and low cost effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
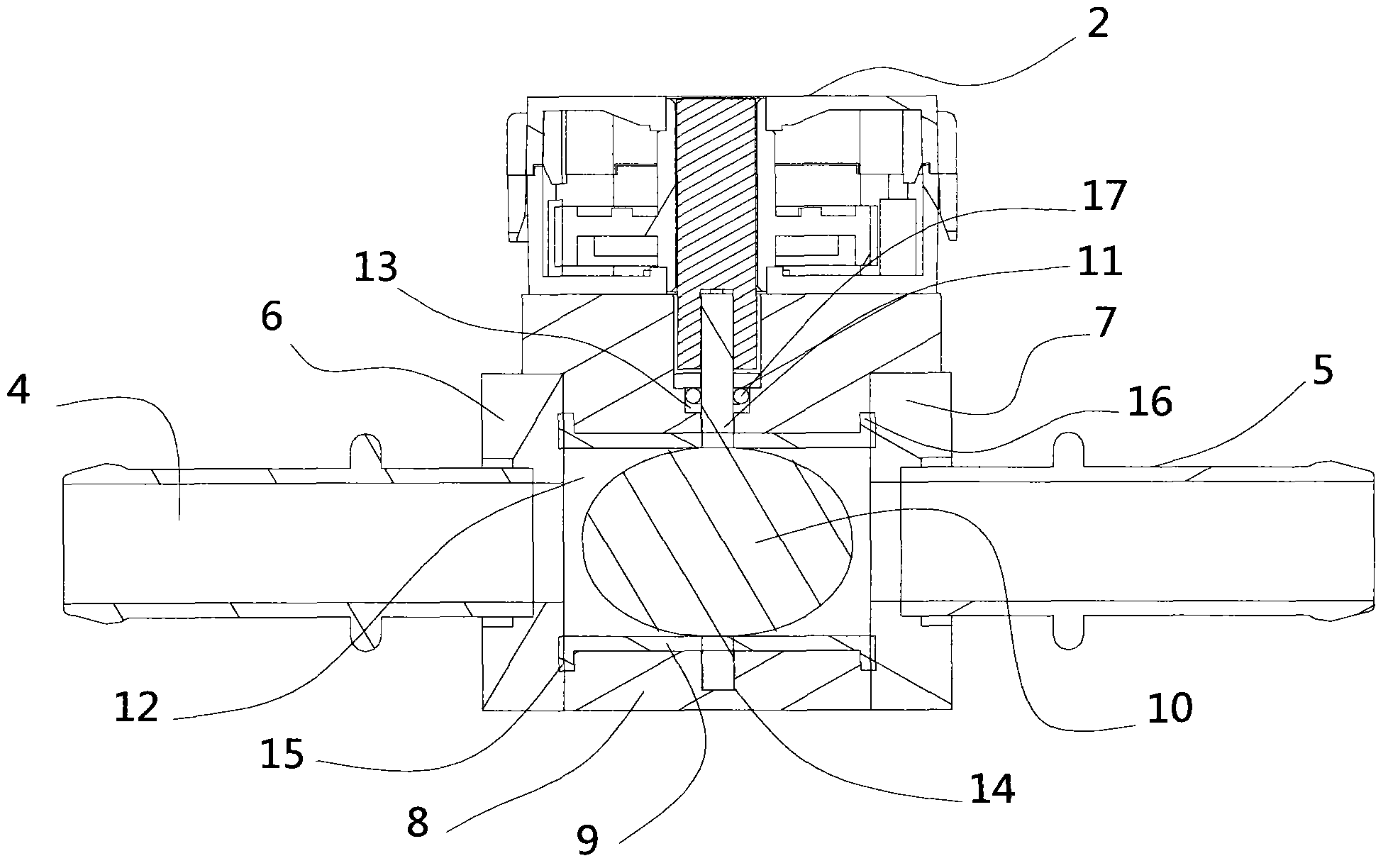
[0026] In the process of specific use of the flow regulating valve of the present invention, the stepper motor drives the vanes arranged in the valve body to swing as required and can stay at any position, thereby controlling the fluid flowing in from the inlet pipeline from the first to the second according to a certain flow ratio. An outlet line and a second outlet line flow out.
[0027] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
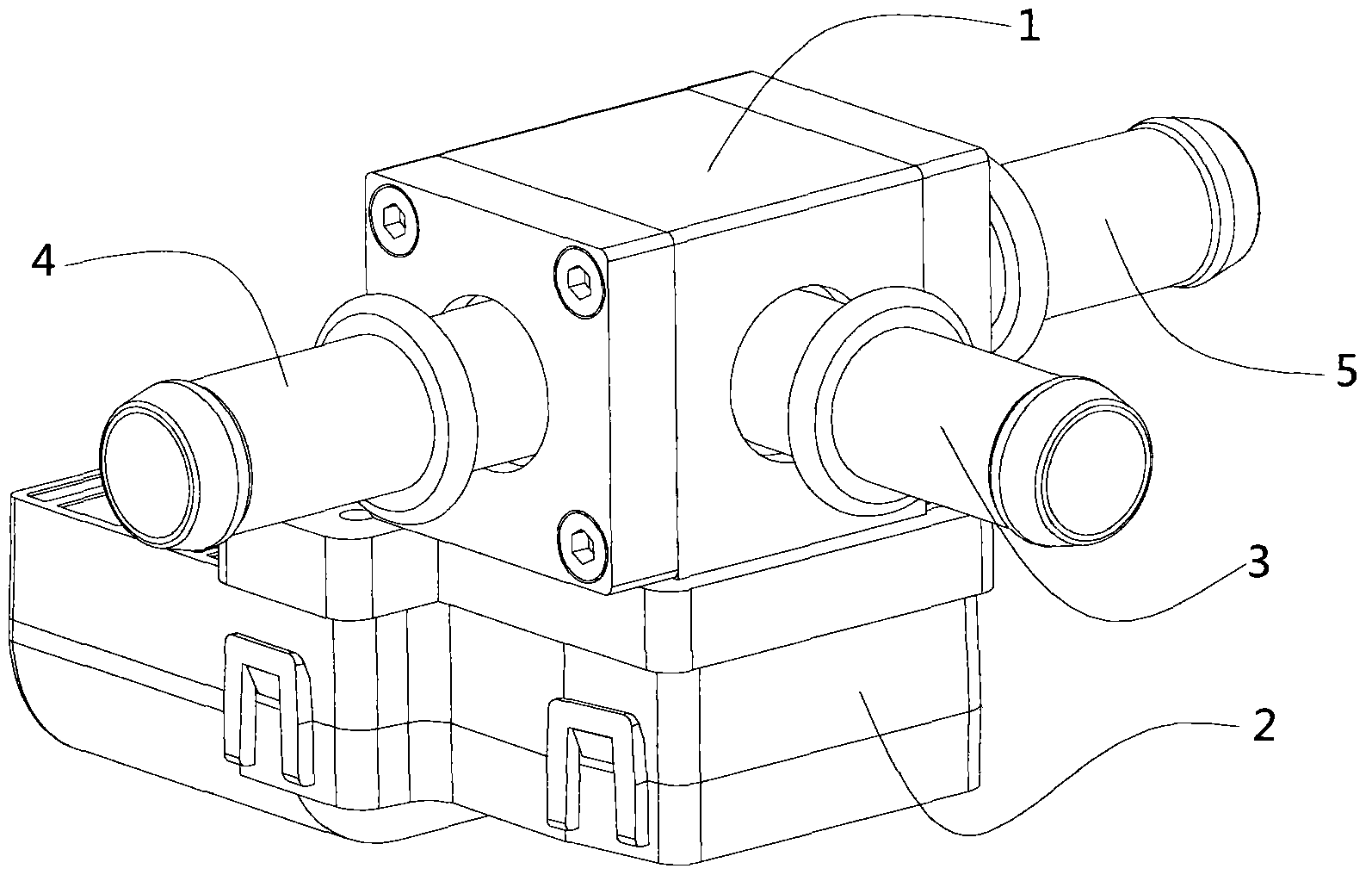
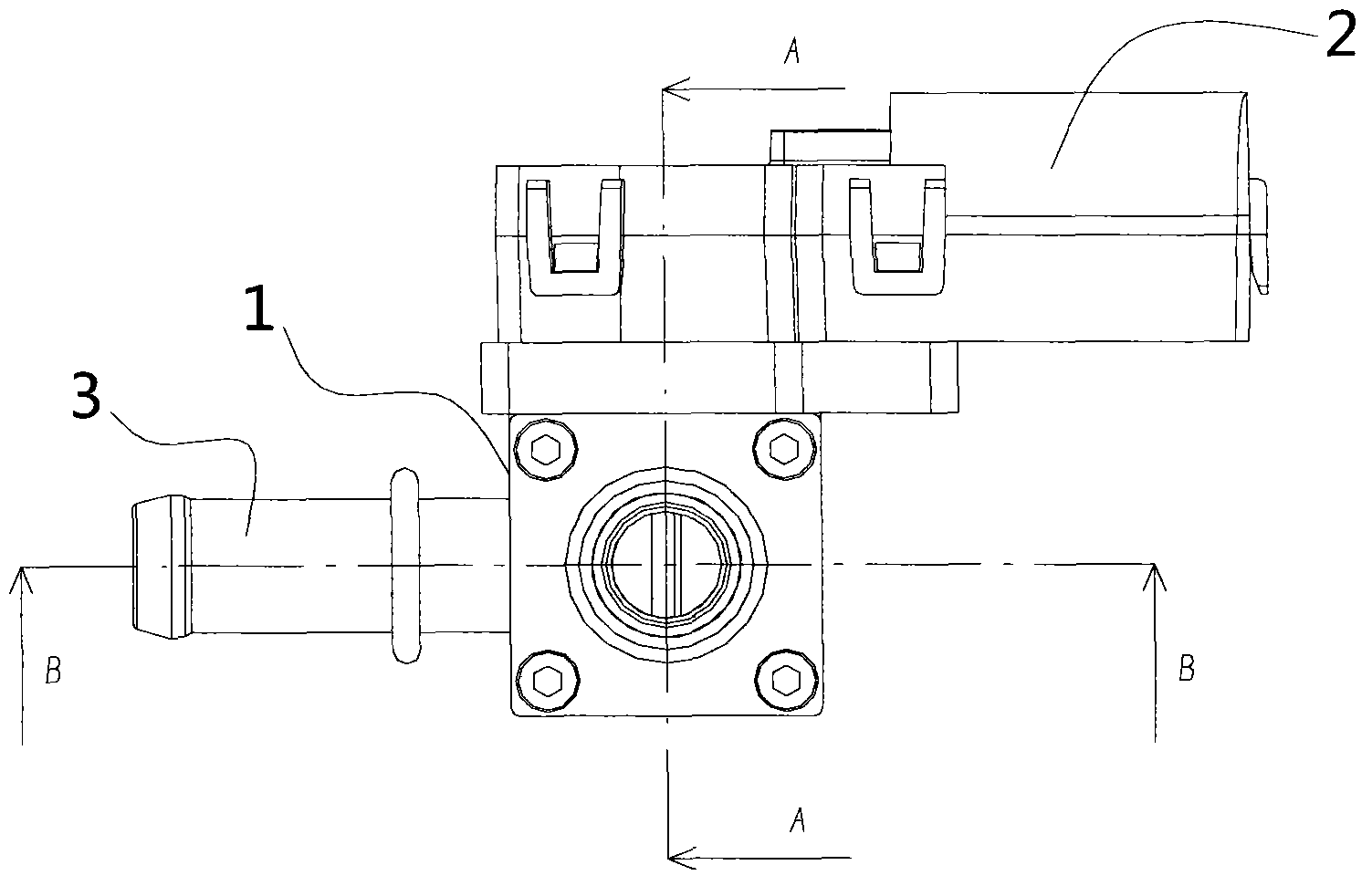
[0028] figure 1 is a perspective view of the first embodiment of the flow regulating valve of the present invention, figure 2 is the front view of the first embodiment of the present invention, image 3 yes figure 2 A-A sectional view of the first embodiment shown, Figure 4 yes figure 2 B-B sectional view of the first embodiment of the flow regulating valve shown, Figure 5 is a blade sectional view of the first embodiment of the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



