

Geometric error screw theory modeling method for numerically-controlled machine tool
A technology of geometric error and modeling method, which is applied in the field of CNC machine tools and can solve the problem of inability to directly obtain the unified display and expression of the six-dimensional pose error of the machine tool.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples.
[0031] Step 1. Establish the geometric error model of the machine tool kinematic chain
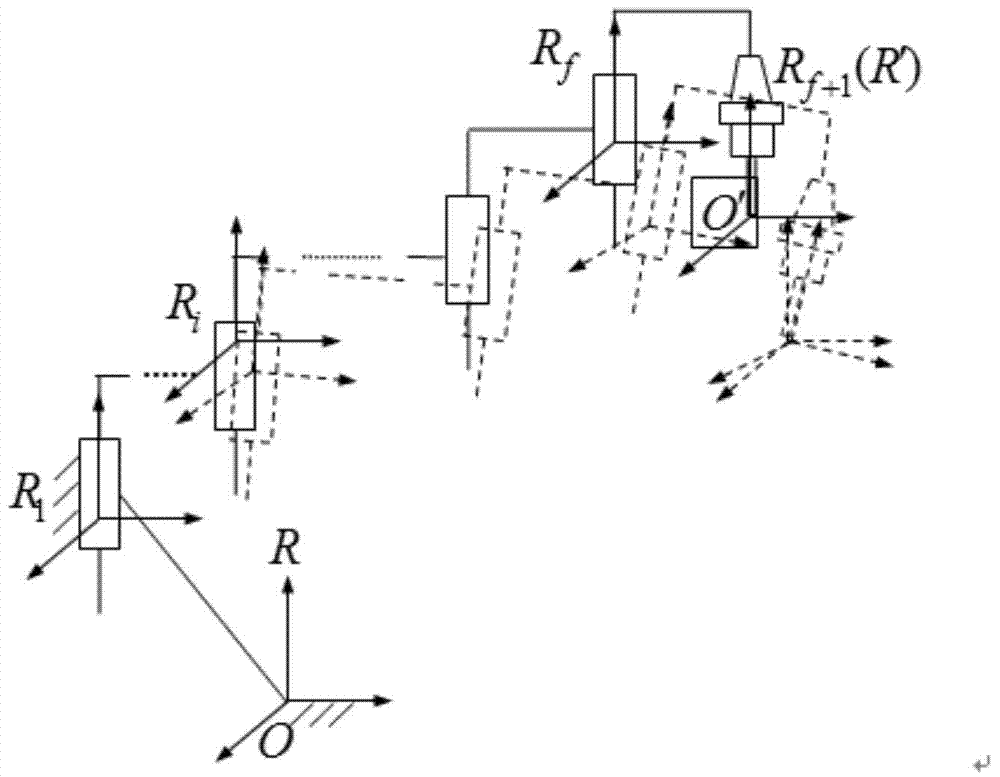
[0032] Such as figure 1 As shown, the global coordinate system R is established at any point O of the bed, and the instantaneous reference coordinate system R' is established at the reference point O' at the end of the kinematic chain, and R' is always parallel to R. In order to describe the effect of each geometric error source in the kinematic chain on the pose error of the end member of the kinematic chain, a conjoined coordinate system R is established on the i-th kinematic pair reference point i . At the same time, a conjoined coordinate system R is established at O' f+1 , and the kinematic chain is in the initial state when R f+1 Consistent with the R' direction.
[0033] According to the structural characteris...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More