

Manipulator based on torsion spring anti-loosening structure
A torsion spring and manipulator technology, applied in the field of manipulators, can solve problems such as affecting the gripping space of the manipulator, increasing the manipulator, etc., and achieve the effects of small occupied space, simplified control system requirements, and fast real-time response.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
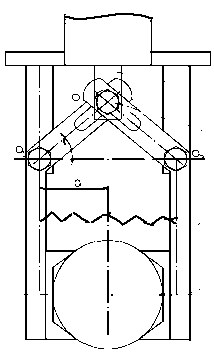
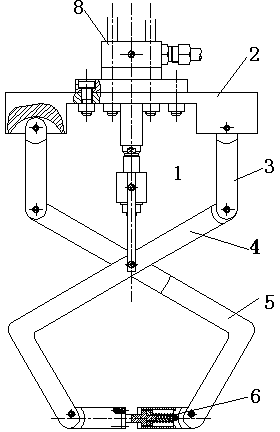
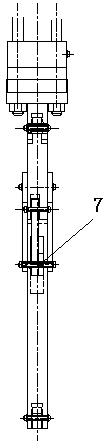
[0015] Such as figure 2 , as shown in 3, a manipulator based on a torsion spring anti-loosening structure, including a working rod 1, a fixed plate 2, a swing rod 3, a left manipulator finger 4, a right manipulator finger 5, a fingertip assembly 6, and a torsion spring anti-loosening assembly 7 , action mechanism 8.
[0016] Both sides of the lower end of the fixed plate 2 are respectively hinged to the left and right manipulator fingers 4,5 through the swing rod 3, and the middle of the left and right manipulator fingers 4,5 are hinged together, and the torsion spring anti-loosening assembly 7 is arranged at the hinge. Such as Figure 4 As shown, the two ends of the torsion spring 9 in the torsion spring anti-loosening assembly 7 are respectively fixed in the left and right manipulator fingers 4,5, and the left and right manipulator fingers 4,5 lowe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More