Iterative learning algorithm for trajectory tracking of wheeled robot
A trajectory tracking and iterative learning technology, used in instruments, general control systems, two-dimensional position/track control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be described in further detail below in conjunction with the accompanying drawings.
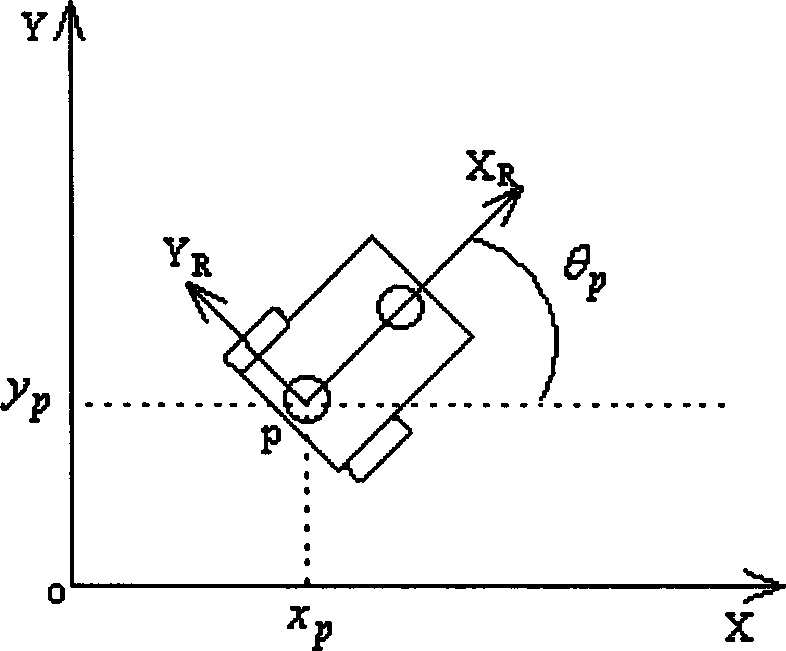
[0014] The present invention takes the two-wheeled mobile robot as the research object (such as figure 1 shown).
[0015] (1) Model description. It has two independent propulsion wheels on the same axis. The robot moves in two-dimensional space. Point P represents the current position of the robot. Point P is defined as [x in generalized coordinates p ,y p , θ p ],x p and y p is the coordinate of P in the Cartesian coordinate system, θ p is the orientation angle of the robot. At time k, for point P, the discrete kinematics equation of the mobile robot can be described by the following equation:
[0016] x p ( k + 1 ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More