

Two-DOF (degree of freedom) controllable mechanical loading mechanism
A loading mechanism and mechanical technology, applied in the direction of mechanically driven excavators/dredgers, etc., can solve problems such as poor kinematics and dynamic performance, easy overload damage of mechanical transmission, difficult design and production of loaders, etc., to improve the resistance The effect of overload capacity, superior kinematics and dynamics performance, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The technical solution of the present invention will be further described below with reference to the accompanying drawings.
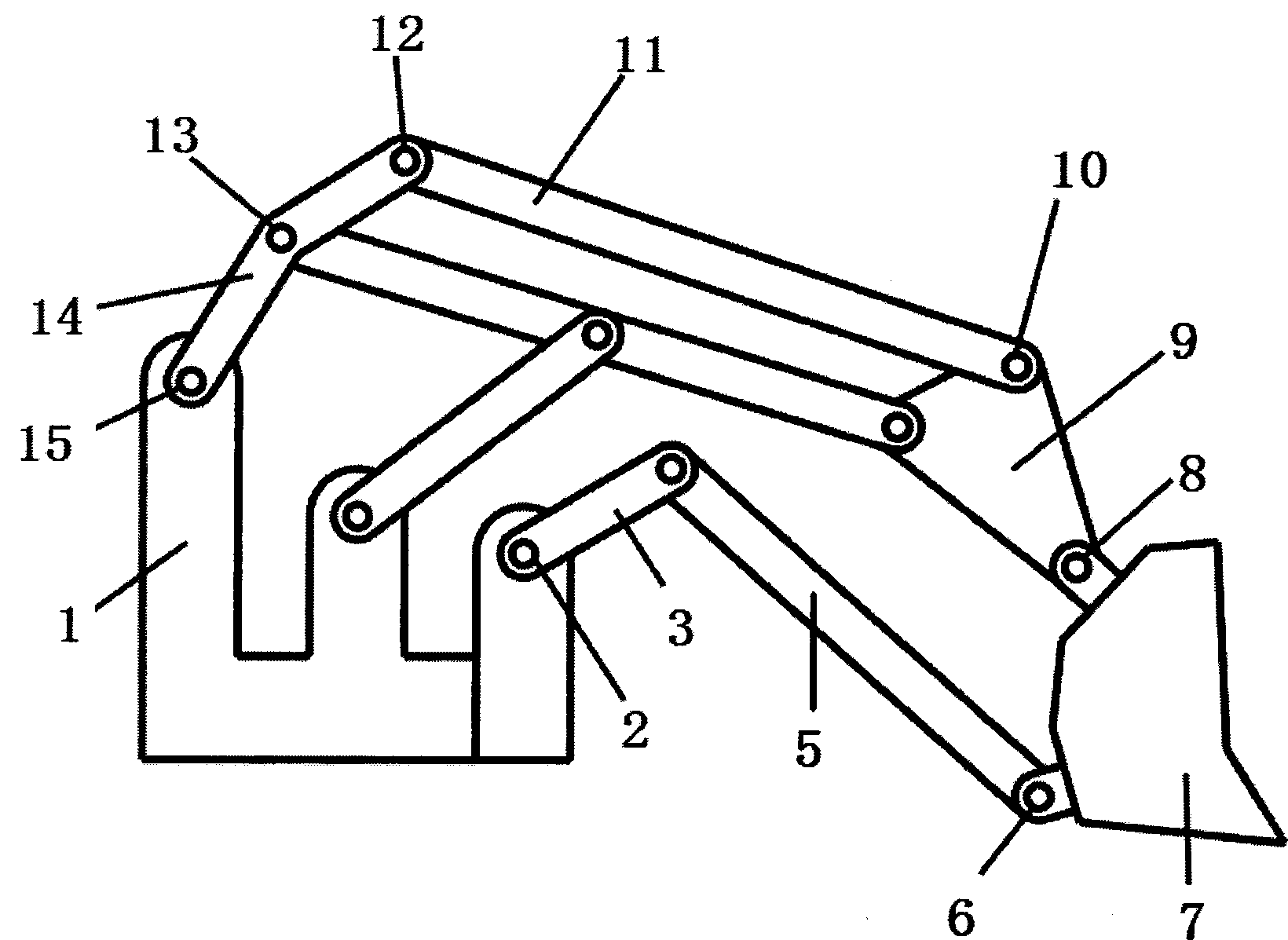
[0017] control figure 1 , figure 2 , image 3 , Figure 4 , a two-degree-of-freedom controllable mechanical loading mechanism, which is composed of a frame 1, a boom lifting branch chain, and a bucket control branch chain.
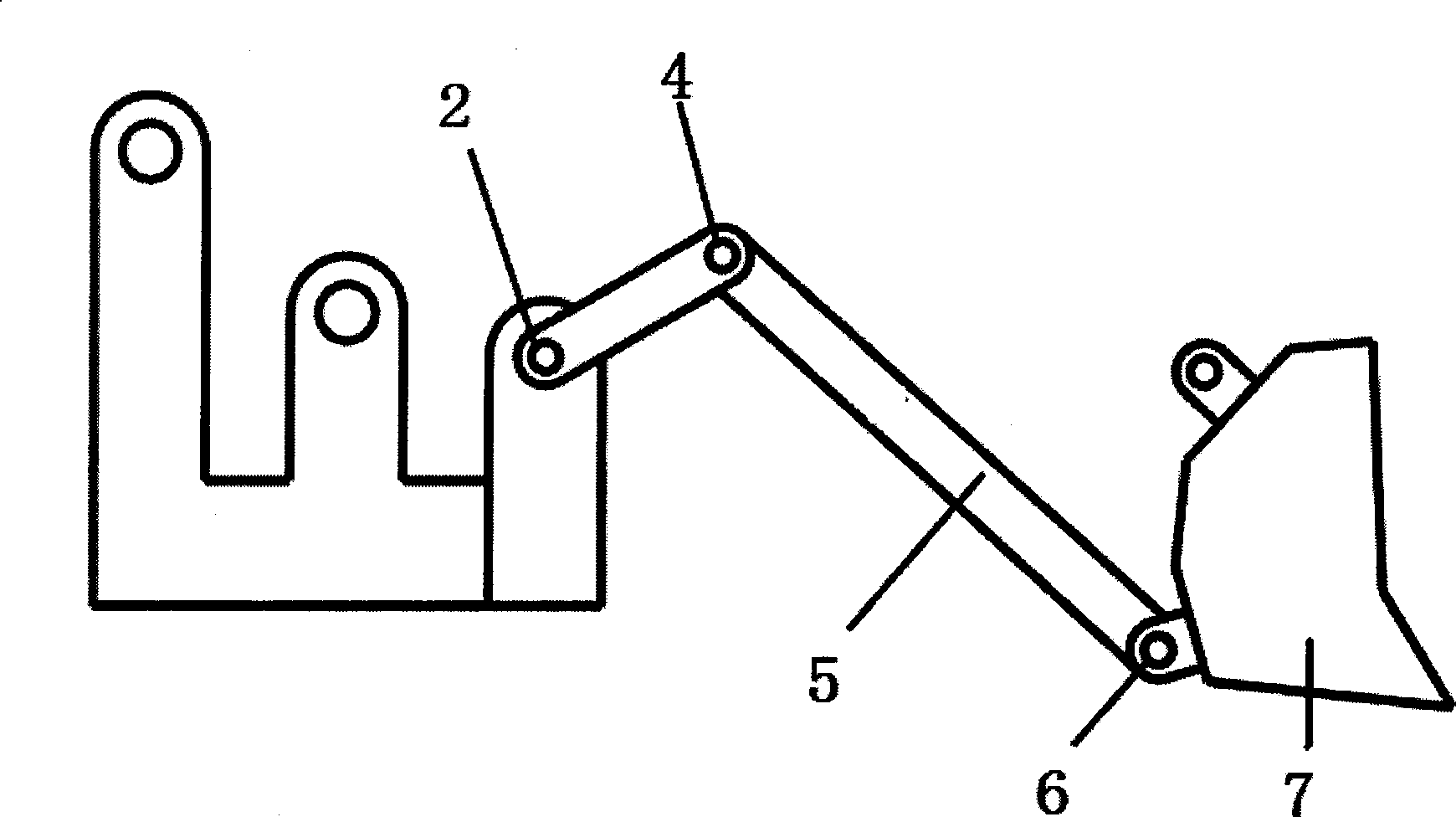
[0018] control figure 1 , figure 2 , the boom lifting branch chain is composed of a boom 5 and a first active rod 3, one end of the first active rod 3 is connected to the frame 1 through the first rotating pair 2, and the other end is connected to the moving rod through the second rotating pair 4. The arm 5 is connected, and the boom 5 is connected with the bucket 7 through the third swivel joint 6 .
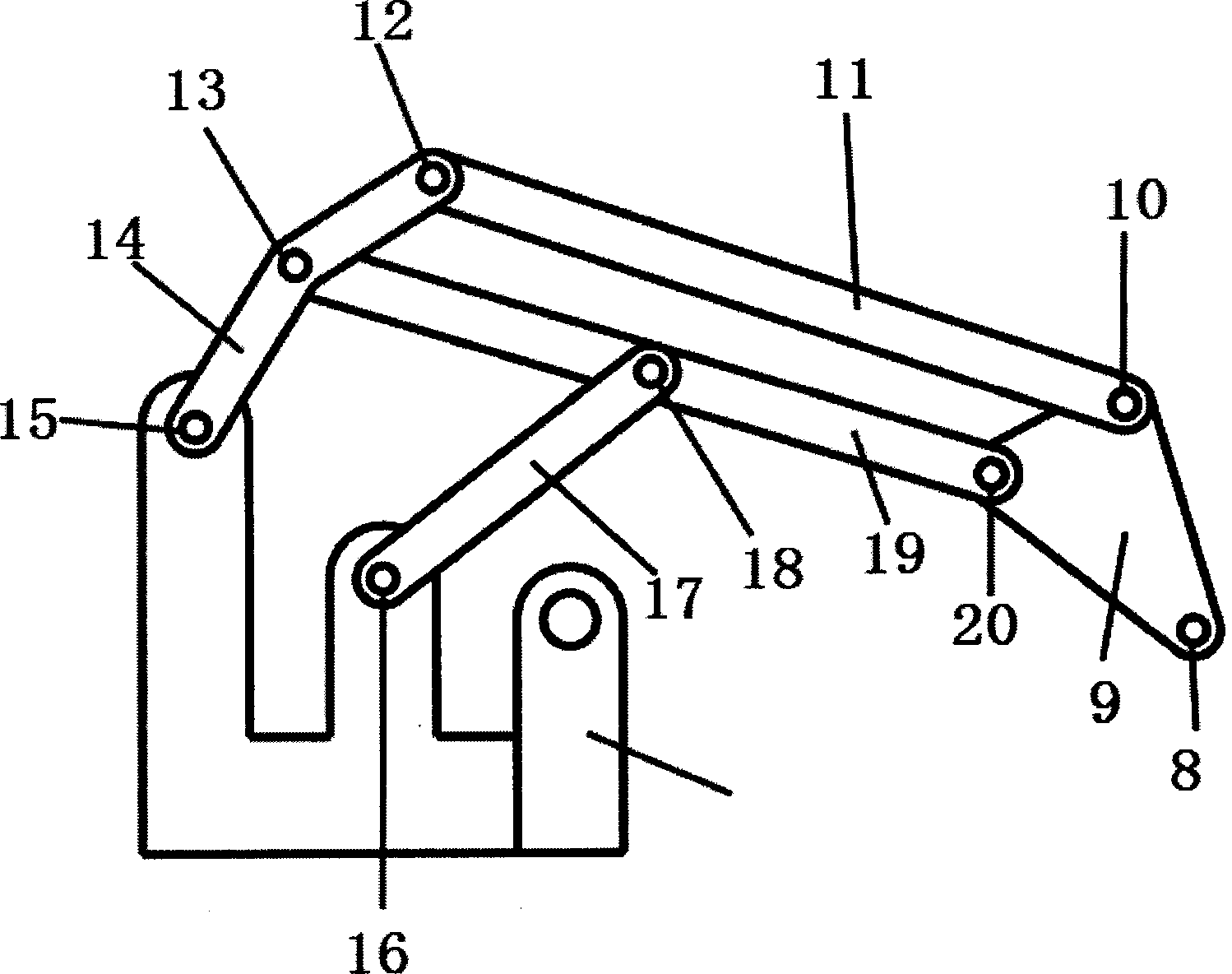
[0019] control figure 1 , image 3 , the bucket control branch chain is composed of a second active rod 17, a support rod 14, a first connecting rod 11, a second connecting rod 19, and a pull rod 9. One end of the se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More