

Method for controlling adaptive iterative learning of knee joints of lower prostheses
An adaptive iterative and learning control technology, applied in prosthetics, medical science, etc., can solve problems such as poor real-time performance, and achieve the effect of reducing tracking error and good tracking performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the objectives, technical solutions, and advantages of the present invention more clearly expressed, the present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
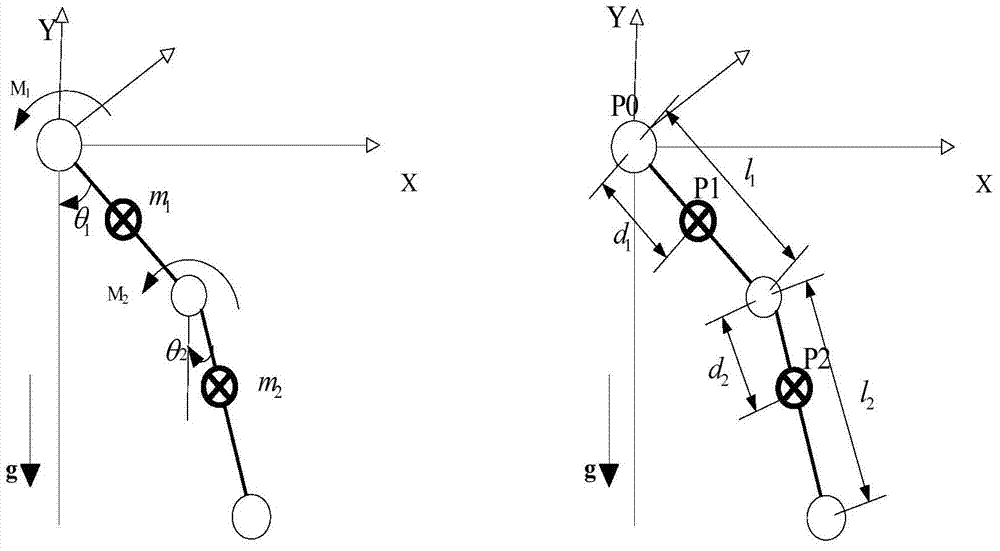
[0034] The main idea of the present invention is to take into account that the human prosthetic system has complex system factors such as model nonlinearity and parameter uncertainty, design an adaptive iterative learning controller for its collection control research, and use the Lyapunov function to prove the stability and tracking error Convergence. Taking the established dynamic model of the artificial leg experimental prototype as the object, the designed controller is simulated.
[0035] Step 1: The normal gait characteristics of the human body can be divided into two stages, namely the support period and the swing period, which are summarized as follows:
[0036] At the end of the support stage, the largest vertical l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More