

Intelligent path tracking control method of unmanned surface vehicle
A path tracking and control method technology, applied in the field of unmanned ship navigation control, can solve the problems of increasing tracking time, difficulty in obtaining accurate hydrodynamic coefficients, long convergence time, etc., and achieve small tracking error and fast tracking control response speed , the effect of improving the convergence performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings.
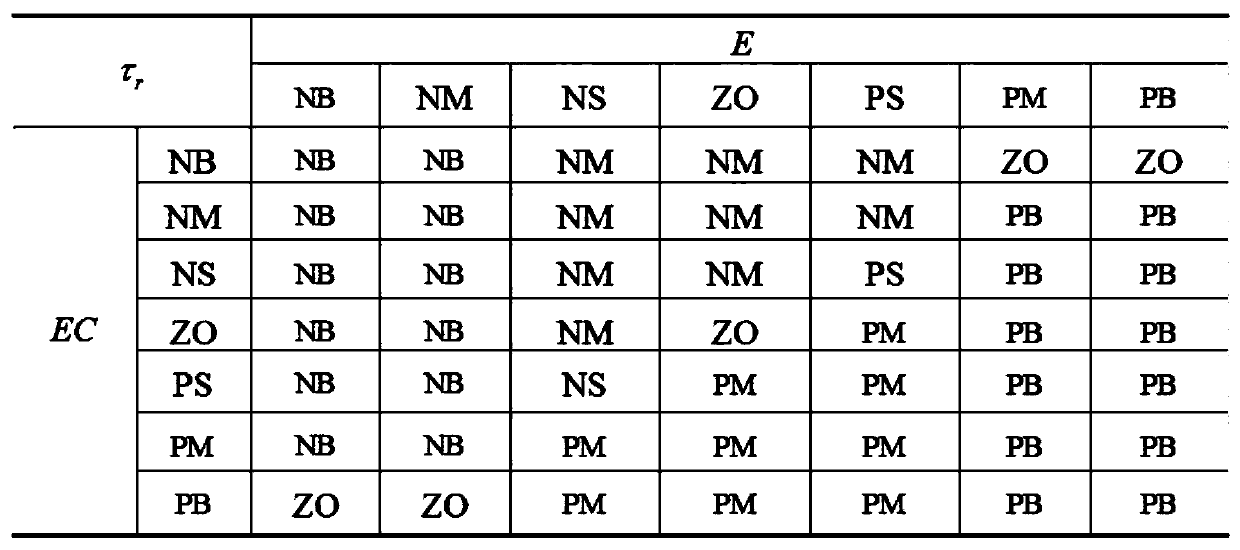
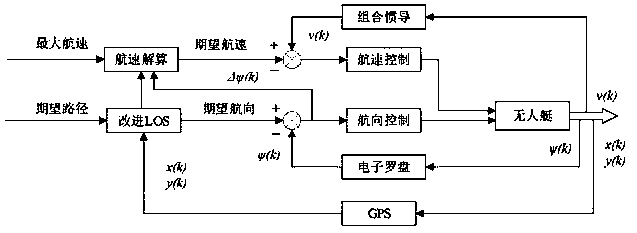
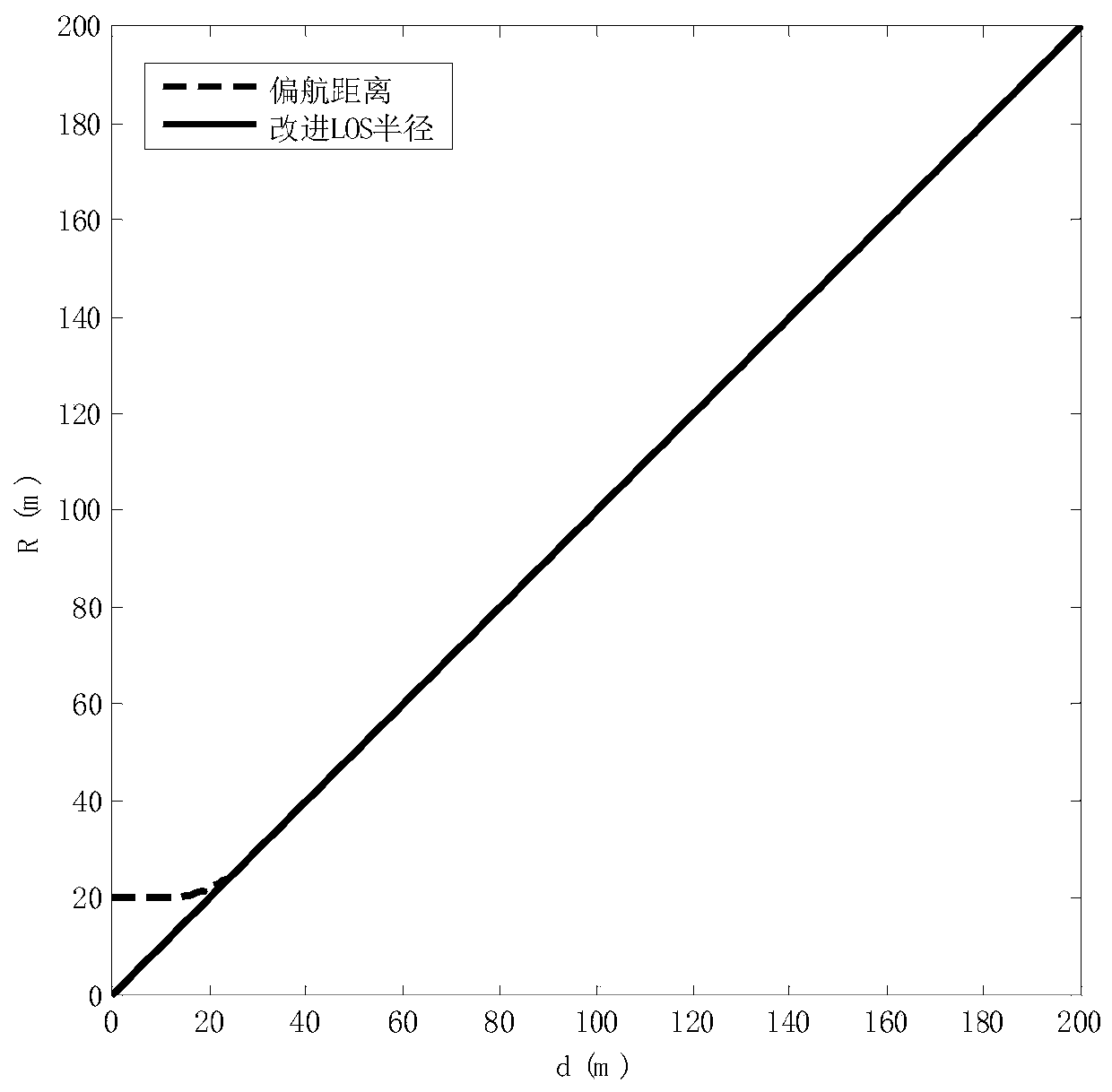
[0055] The invention discloses an intelligent path tracking control method for an unmanned watercraft, which belongs to the field of unmanned surface navigation control. In the path tracking control process of the unmanned vehicle, firstly, the expected course angle of the unmanned vessel is obtained from the position of the expected path point and the real-time position of the unmanned vessel according to the proposed adaptive radius line-of-sight method, and then the solution is calculated according to the course deviation and yaw distance Angle compensation is performed on the desired angle so that the UAV can obtain the best desired heading angle. In the heading control link, an adaptive intelligent fuzzy controller is designed. In the speed control link, a speed solver is firstly designed to calculate the optimal sailing speed in real time, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More