

Method for detecting position of automobile meter needle based on mechanical angle and scale identification
A technology for automobile instrumentation and mechanical angle, which is applied in the field of position detection of automobile instrumentation pointers, can solve problems such as pointer deformation, inaccurate scale distribution characteristics, and inability to obtain scale sequences, and achieves the effect of clearing deviations and eliminating corner errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
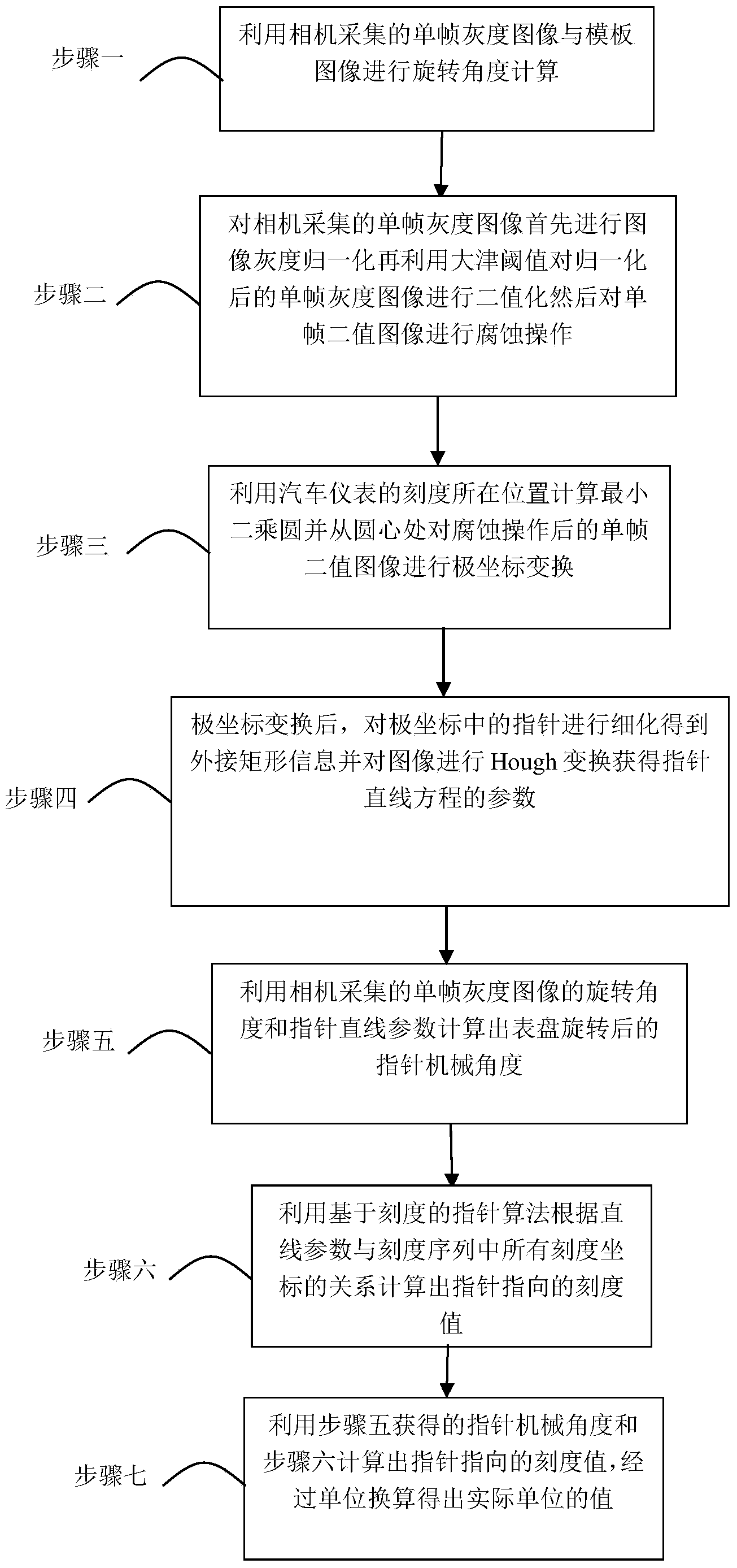
[0031] Specific Embodiment 1: A method for detecting the position of an automobile meter pointer based on mechanical angle and scale recognition in this embodiment is specifically prepared according to the following steps:
[0032] Step 1. Calculate the rotation angle by using the single-frame grayscale image collected by the camera and the template image;
[0033] Step 2: First, normalize the image grayscale on the single-frame grayscale image collected by the camera, then use the Otsu threshold to binarize the normalized single-frame grayscale image, and then perform a corrosion operation on the single-frame binary image;
[0034] Step 3, using the position of the scale of the automobile instrument to calculate the least squares circle and performing polar coordinate transformation on the single-frame binary image after the corrosion operation from the center of the circle;
[0035] Step 4, after the polar coordinate transformation, refine the pointer in the polar coordinate...
specific Embodiment approach 2
[0042] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in step 1, the process of calculating the rotation angle by using the single-frame grayscale image collected by the camera and the template image is as follows:
[0043] (1) Select the template image, if the rotation angle of the template image is close to 0, step the template image at plus or minus 1 degree, where plus or minus 1 degree refers to the rotation angle with the center of the template image as the rotation center; where, The template image is collected when the camera environment is stable and the instrument to be tested is placed without deviation;
[0044](2) Match the selected template image with the collected single-frame grayscale image. The center of the template image is the rotation center. When the template image is rotated at 0 degrees, it is matched with the collected single-frame grayscale image to obtain the matching when the template image is rotated...
specific Embodiment approach 3
[0047] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that the single-frame grayscale image collected by the camera is firstly normalized in step two, and then the normalized image is normalized using the Otsu threshold. The process of binarizing a single-frame grayscale image and then corroding a single-frame binary image is:
[0048] 1) Normalize the grayscale of the single frame grayscale image collected by the camera:
[0049] Let the grayscale range of the image be [m,n], expand it to [0,255], according to the following formula:
[0050] f(x,y) is the original gray level of a certain point, and g(x,y) is the gray level of the point after normalization;
[0051] 2) Use the Otsu threshold to binarize the normalized single-frame grayscale image:
[0052] (1) Calculate the gray histogram of the image, using P i , i=0, 1, 2, ..., 255 represent each component of the histogram, P i is the probability that the i-th gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More