

High-precision three-dimensional posture inertia measurement system and method based on MEMS (Micro Electro Mechanical Systems)
A three-dimensional attitude and inertial measurement technology, applied in directions such as navigation through velocity/acceleration measurement, which can solve the problems of low accuracy and high sensor cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
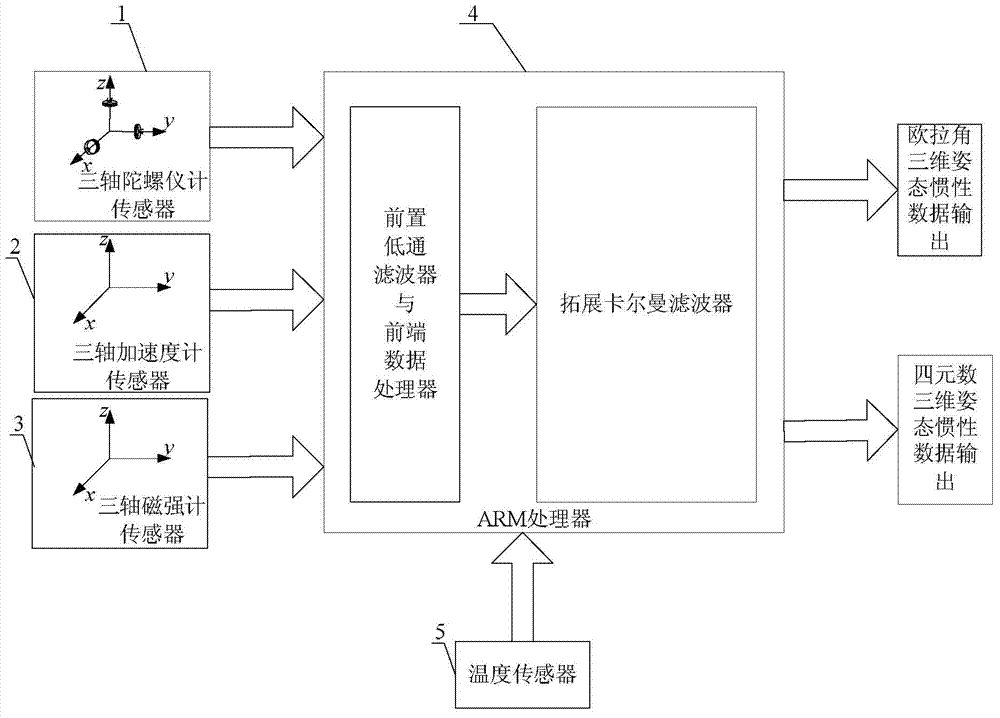
[0014] Specific implementation mode one: refer to figure 1 Specifically illustrate the present embodiment, a kind of MEMS-based high-precision three-dimensional attitude inertial measurement system described in the present embodiment, it comprises microelectromechanical type inertial measurement device, it also comprises ARM processor 4 and temperature sensor 5,
[0015] The MEMS inertial measurement device includes a three-axis gyroscope sensor 1, a three-axis accelerometer sensor 2 and a three-axis magnetometer sensor 3,
[0016] The three-axis gyroscope sensor 1 is used to measure and obtain the angular velocity, and send the angular velocity data obtained by the measurement to the ARM processor 4,
[0017] The three-axis accelerometer sensor 2 is used to measure and obtain the acceleration, and the acceleration data obtained by the measurement is sent to the ARM processor 4,
[0018] The three-axis magnetometer sensor 3 is used to measure and obtain the magnetic intensity...
specific Embodiment approach 2
[0021] Embodiment 2: The difference between this embodiment and the MEMS-based high-precision three-dimensional attitude inertial measurement system described in Embodiment 1 is that the ARM processor 4 is realized by the model STM32F405.
specific Embodiment approach 3
[0022] Embodiment 3: The difference between this embodiment and the MEMS-based high-precision three-dimensional attitude inertial measurement system described in Embodiment 1 is that the three-axis gyroscope sensor 1 is implemented with a model of MPU6050.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More