

Self-guide carrying platform and navigation control method for carrying platform
A carrier platform and control method technology, applied in the field of robotics, to achieve accurate path planning, reduce errors, and ensure integrity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
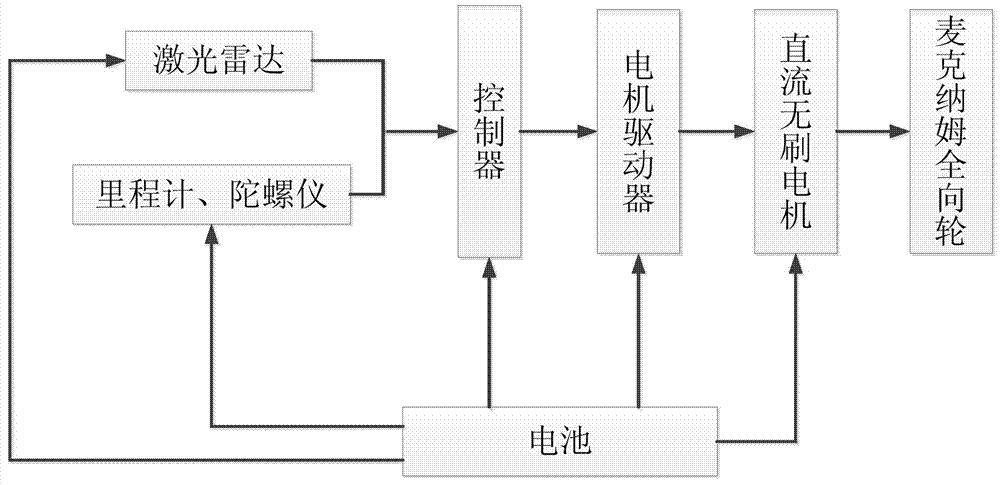
[0033] Such as figure 1 As shown, the present invention provides a self-guided carrying platform, which includes a position information acquisition device, a controller, a motor driver, a DC brushless motor, and a mecanum omnidirectional wheel which are connected in sequence, and are an information acquisition device, a controller, and a motor. The driver and the battery powered by the DC brushless motor; the position information acquisition device includes a laser radar, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More