

Path Planning Method for Autonomous Underwater Vehicle Based on Double Neural Network Reinforcement Learning
A dual neural network and underwater vehicle technology, applied in two-dimensional position/channel control, instrument, vehicle position/route/altitude control, etc., to achieve good real-time performance, reduce learning time, and improve learning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below with reference to the accompanying drawings and specific embodiments.
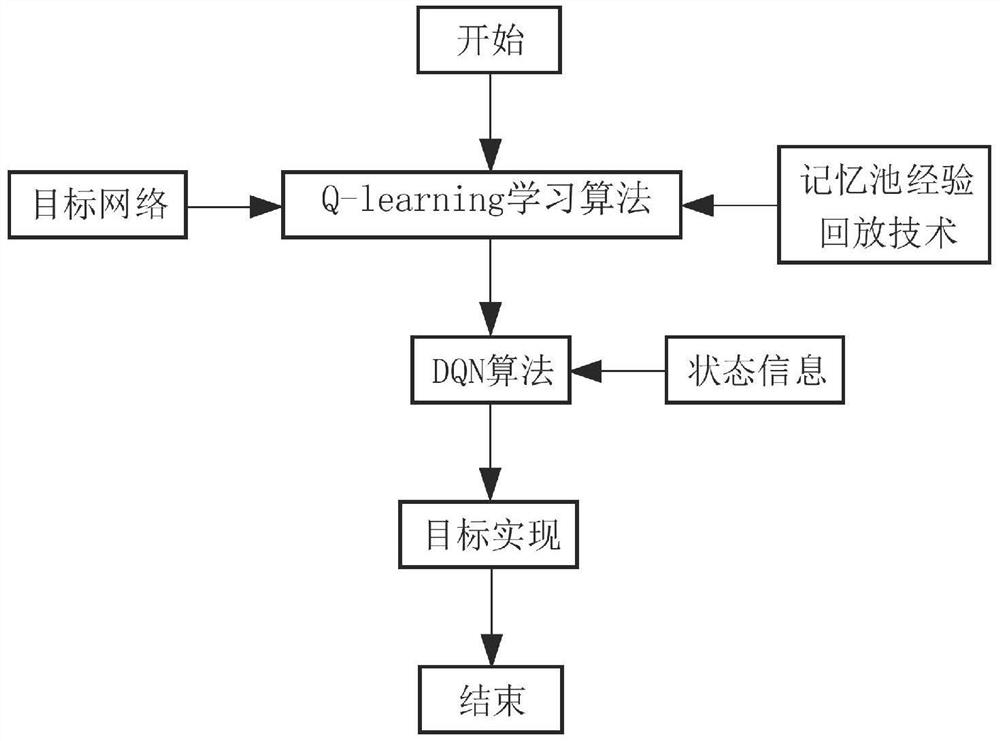
[0041] like figure 1 As shown in the figure, the present invention proposes a path planning method for autonomous underwater vehicle based on dual neural network reinforcement learning, which is based on adding objective function and memory pool experience playback technology to the Q-learning learning algorithm to form dual neural network reinforcement learning (Deep Q Network). , DQN) algorithm combined with AUV position state information to obtain AUV path planning decision; specifically includes the following steps:
[0042] Step 1: Optimize the problem that the Q-learning learning algorithm requires large storage space and long search time.
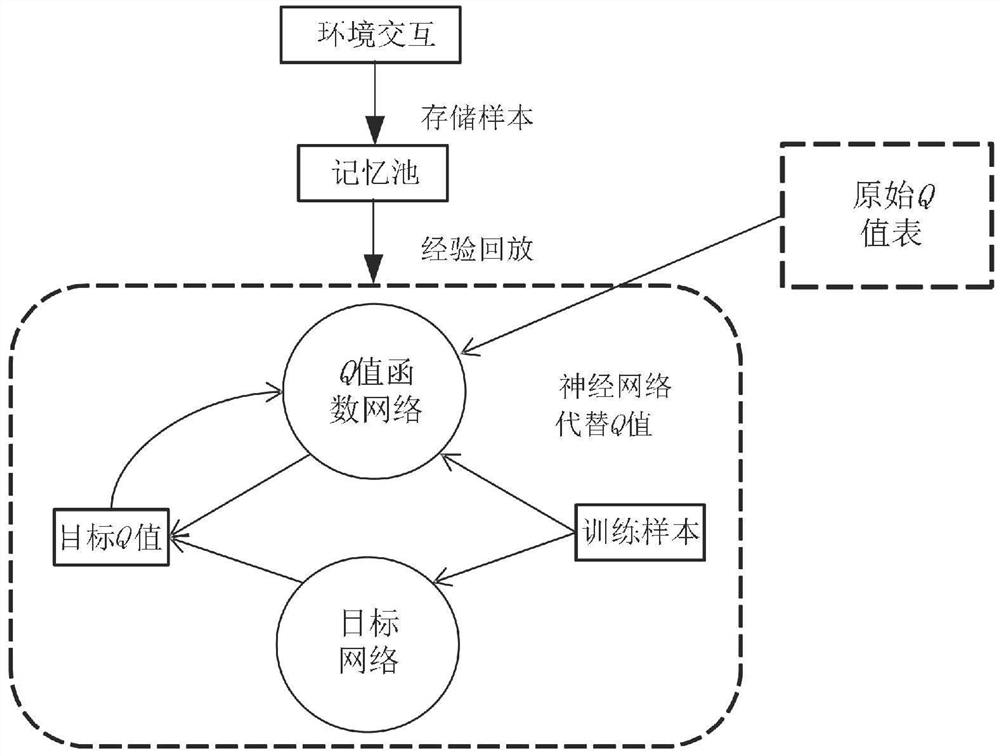
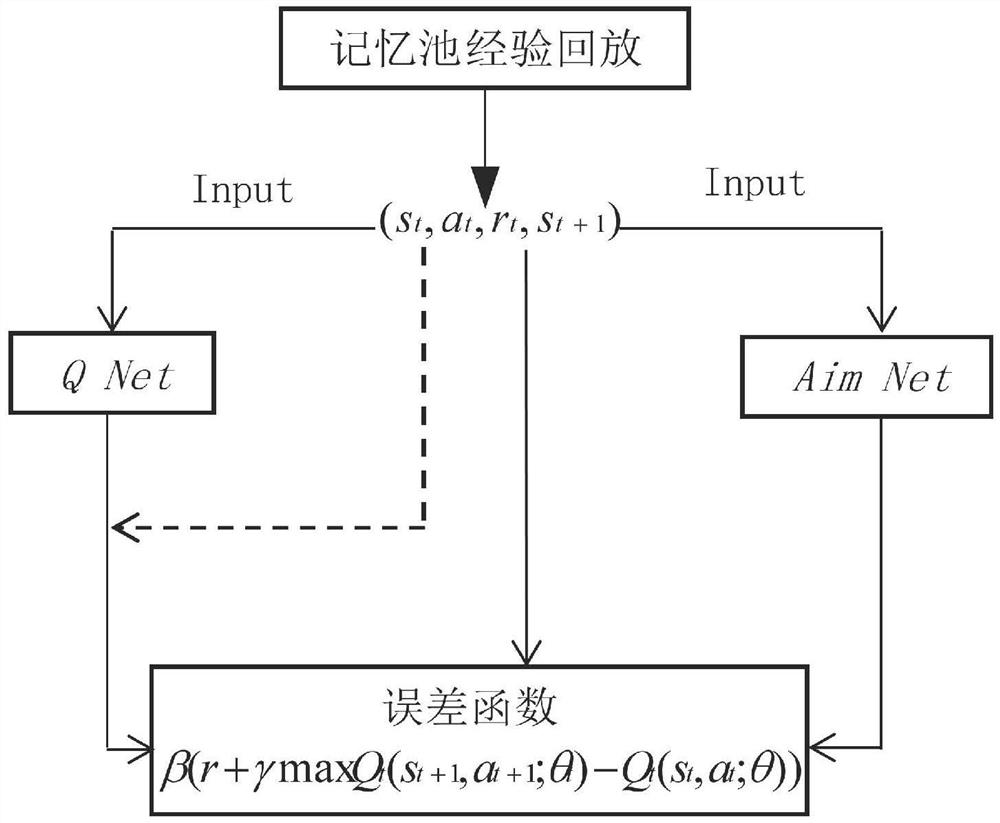
[0043] The main idea of the Q-learning learning algorithm is to convert the current state of the AUV s t and perform action a t A Q-value table (Q Net, used to store the state and execution action ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More