

Steering gear control system and method based on fuzzy neural PID control and absolute encoder
A technology of absolute encoder and absolute value encoder, which is applied in general control system, control/adjustment system, adaptive control, etc., to achieve fast operation speed, low power consumption and high performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below with reference to the accompanying drawings and specific embodiments, but the embodiments of the present invention are not limited thereto.
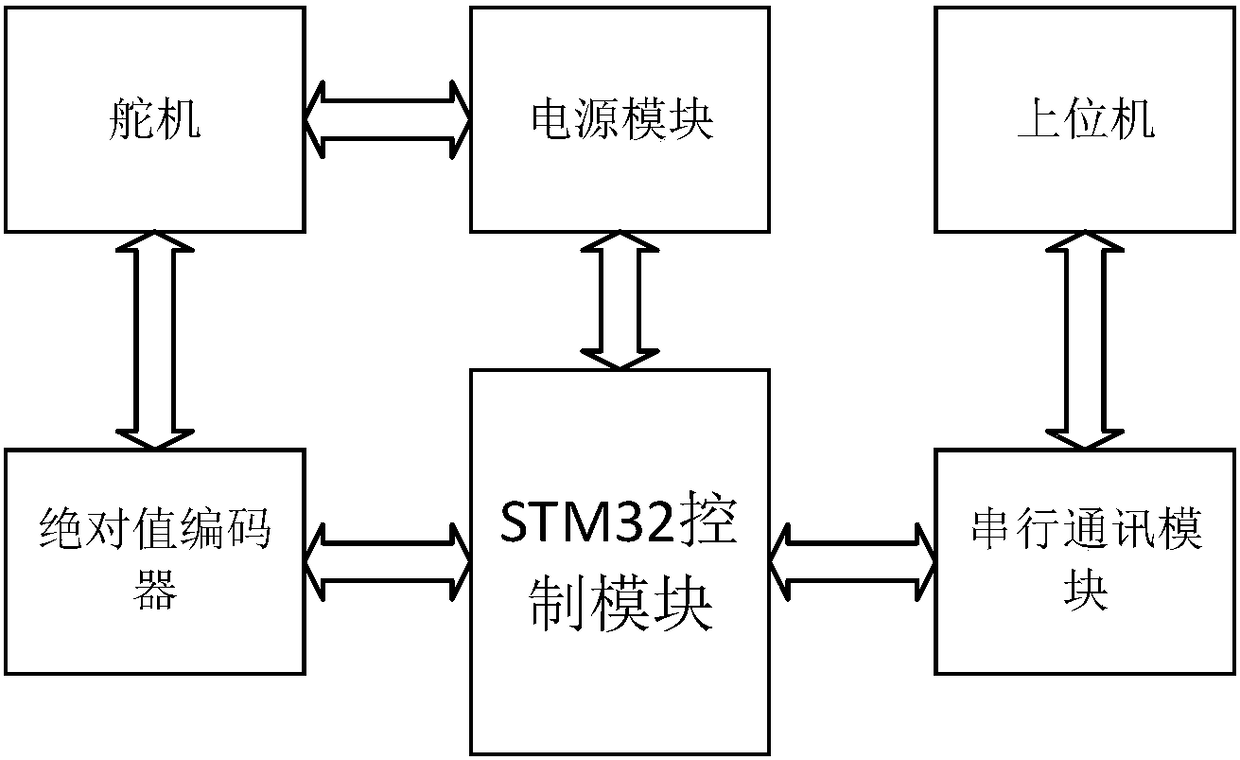
[0026] see figure 1 , in this embodiment, the steering gear control system based on fuzzy neural PID control and absolute encoder specifically includes a fuzzy neural PID control unit, an absolute encoder, a serial communication unit, a host computer, and a power module, and the absolute encoder is used for To obtain the rotation angle information of the steering gear, the fuzzy neural PID control unit selects the STM32 control module (STM32FZET6) based on the ARM Cortex-M3 core, and the power module supplies power to the STM32 control module and the steering gear. The output end of the absolute encoder is connected to the input end of the STM32 control module, and the PWM generated by the STM32 control module is output to the steering gear. The maximum operating frequency o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More