

Wheel and leg composite carrying robot
A robot, wheel-legged technology, applied in the fields of material transportation, military reconnaissance, and planetary exploration, can solve the problems of unstable foot-end motion trajectory of walking robots and poor coordination of wheel-leg motion, so as to optimize the leg motion trajectory, reduce internal friction, simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings.
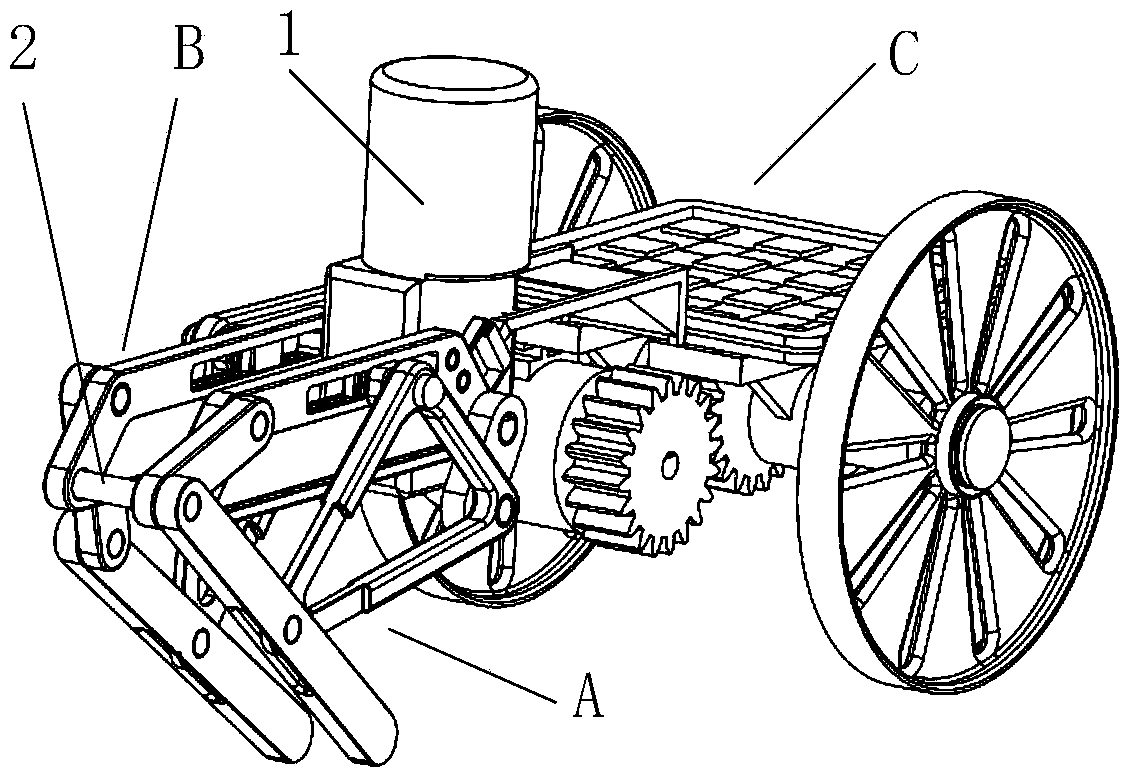
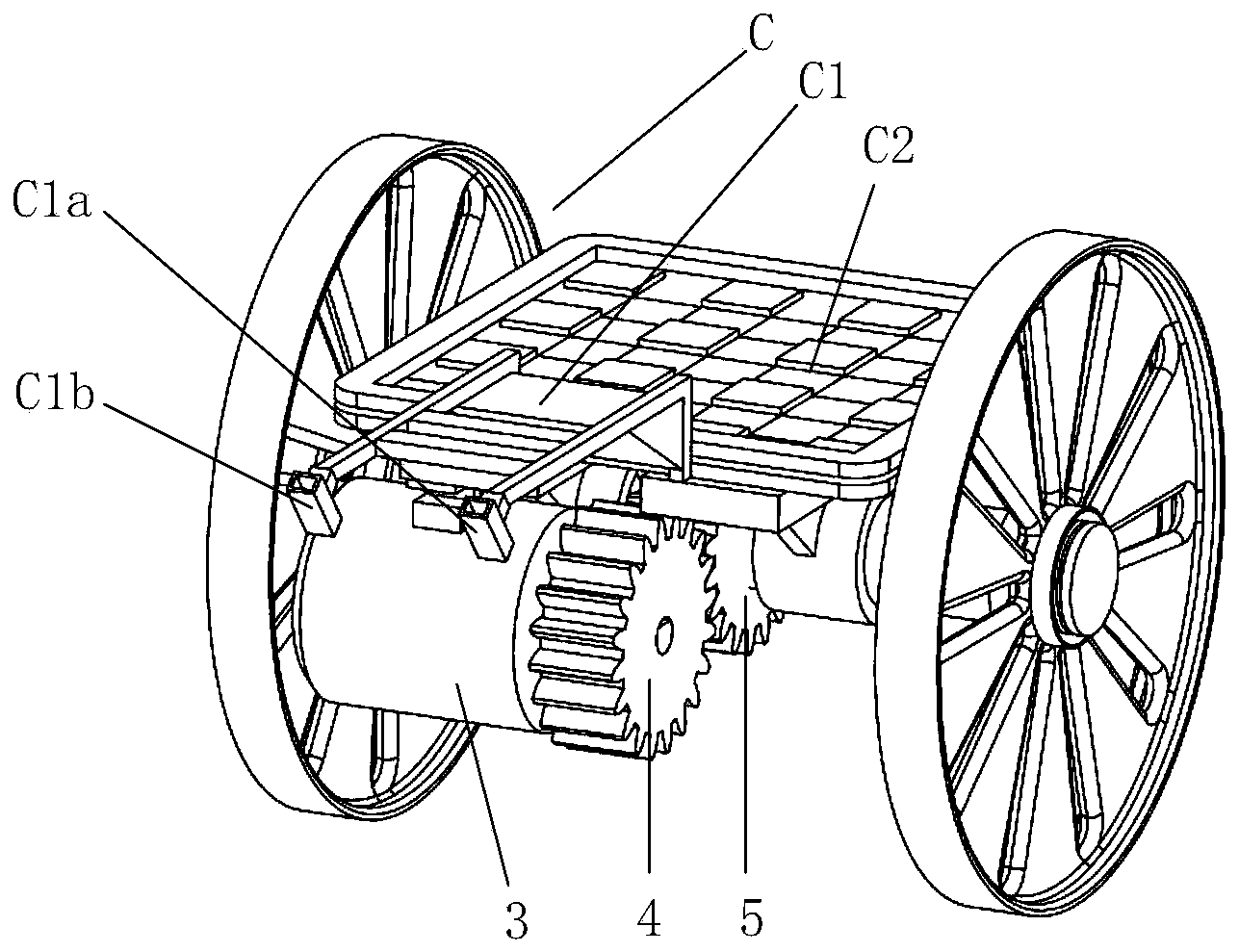
[0021] A wheel-leg composite carrier robot, such as figure 1 Shown, includes left leg (A), right leg (B) and trailer (C).
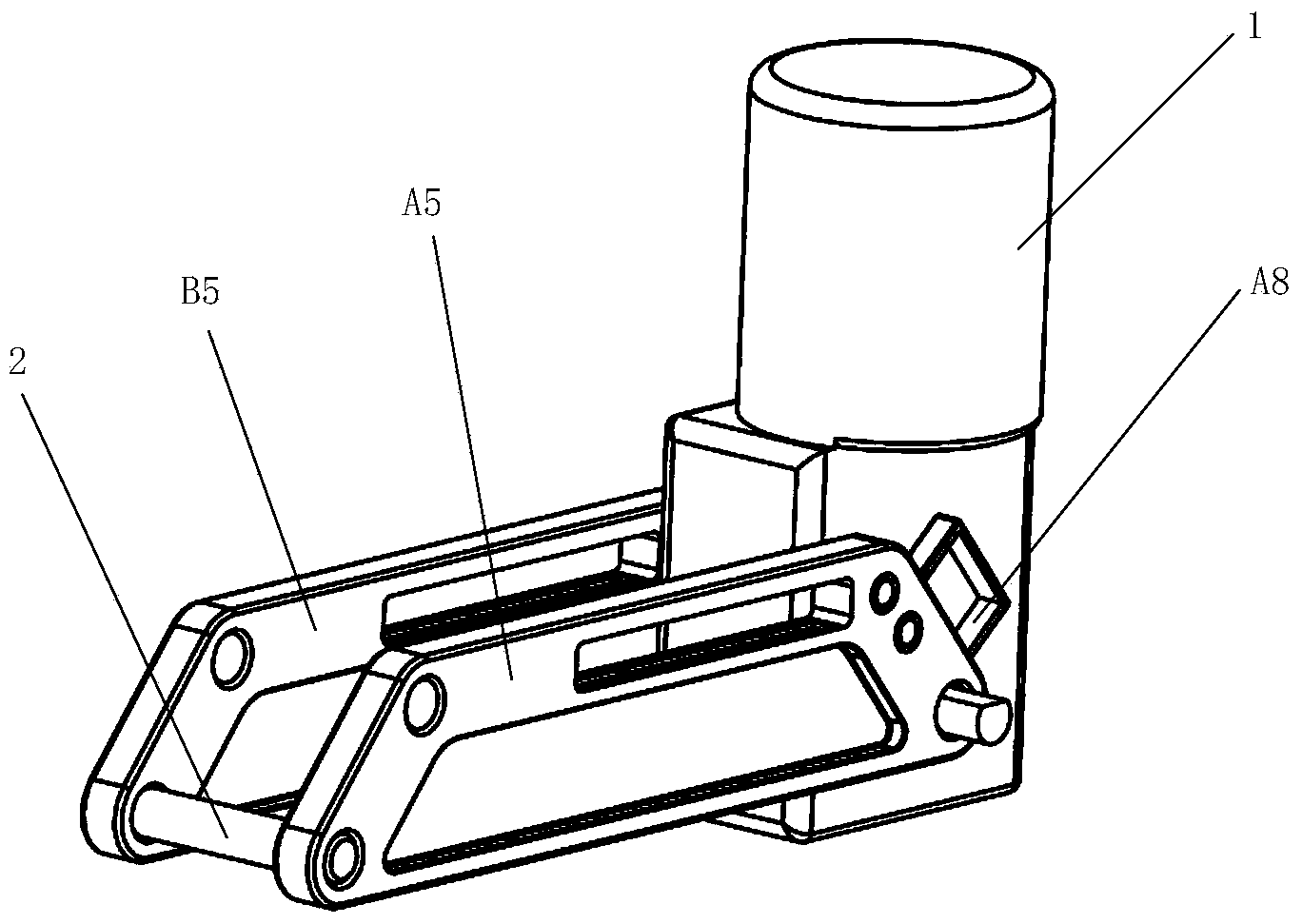
[0022] The left leg (A) is a single-degree-of-freedom link mechanism, such as figure 2 As shown, the two motor mounting holes of the left frame (A5) of the left leg (A) close to the chute are fixed with the double-shaft motor (1) through screws; the output shaft of the double-shaft motor (1) passes through The left frame (A5) is fixedly connected with the left first connecting rod (A1) through jacking screws.
[0023] The right leg (B) is a single-degree-of-freedom link mechanism, such as figure 2 As shown, the two motor mounting holes of the right frame (B5) of the right leg (B) close to the chute are fixed with the double-shaft motor (1) through screws; the other output shaft of the double-shaft motor (1) Pass through the right f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More