Four-branch three-level one-rotation high-speed parallel manipulator
A four-chain, manipulator technology, applied in the field of robotics, can solve the problems of uneven force, low service life, uneven force, etc., and achieve the effects of good rigidity and stability, high motion accuracy, and flexible motion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific examples.
[0020] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given here (here only introduces the moving platform that generates rotary motion), and the detailed description is as follows with the accompanying drawings:
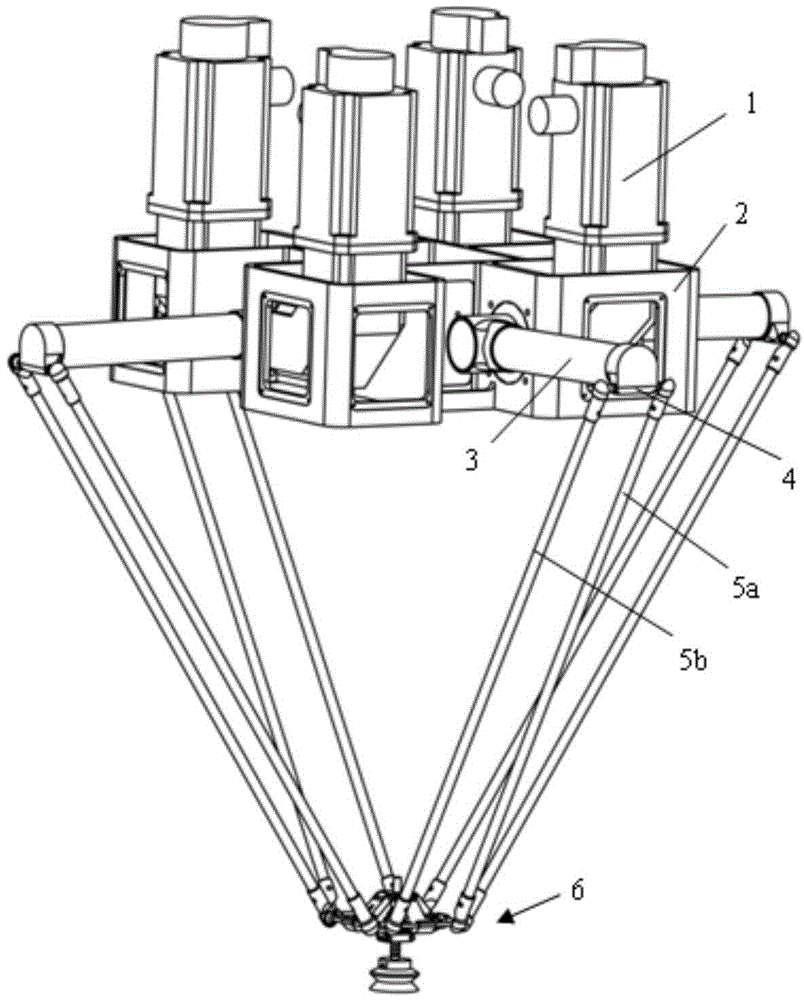
[0021] see figure 1 , the present invention is a four-branched three-rotation-one-level high-speed parallel manipulator, including a fixed frame 2, a moving platform 6, and four center-symmetrical arrangements symmetrically arranged between the fixed frame 2 and the moving platform 7 with the same structure. The kinematic branches; each kinematic branch is composed of a near-frame rod 3, an upper connecting shaft 4, two mutually parallel and equal-length far-standing rods 5a, 5b and a lower connecting shaft. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com