

Bionic crawler-type adhesion walking mechanism and moving method thereof
A walking mechanism and crawler-type technology, applied in the field of bionic robots, can solve problems such as inability to adjust adaptively, fixed mechanical properties, etc., and achieve the effect of solving internal redundant forces
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
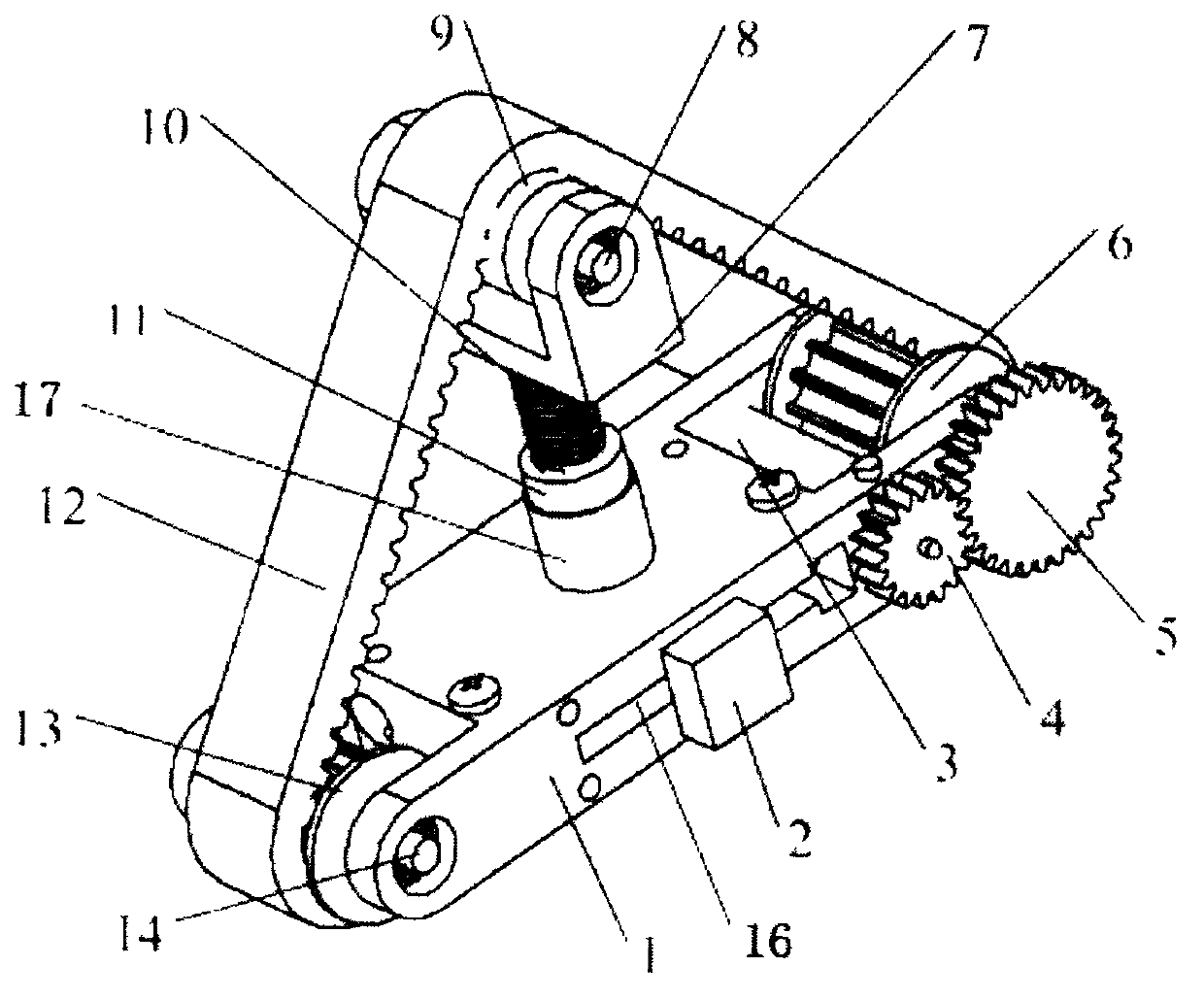
[0037] Such as Figure 1a and Figure 1bAs shown, a bionic crawler-type adhesive walking mechanism includes a fuselage frame 1, a tensioning mechanism, a driving mechanism, and an adhesive belt 12. The driving mechanism includes a driving motor 3, a driving motor gear 4, a driving wheel 6, Driven wheel 13, the driving wheel 6 is connected to one end of the fuselage frame 1 through the gear shaft 5, the driven wheel 13 is connected to the other end of the fuselage frame 1 through the driven wheel shaft 14, and the drive motor 3 drives The driving motor gear 4, the driving motor gear 4 is meshed with the gear shaft 5, and the tensioning mechanism includes a tensioning wheel frame 7, a tensioning spring 10, a miniature force sensor 11, a tensioning wheel 9, a sleeve The sleeve 17, the sleeve 17 is arranged on the upper surface of the fuselage frame 1, the upper surface of the sleeve 17 is provided with the miniature force sensor 11, and the tensioning wheel frame 7 includes a sha...
Embodiment 2
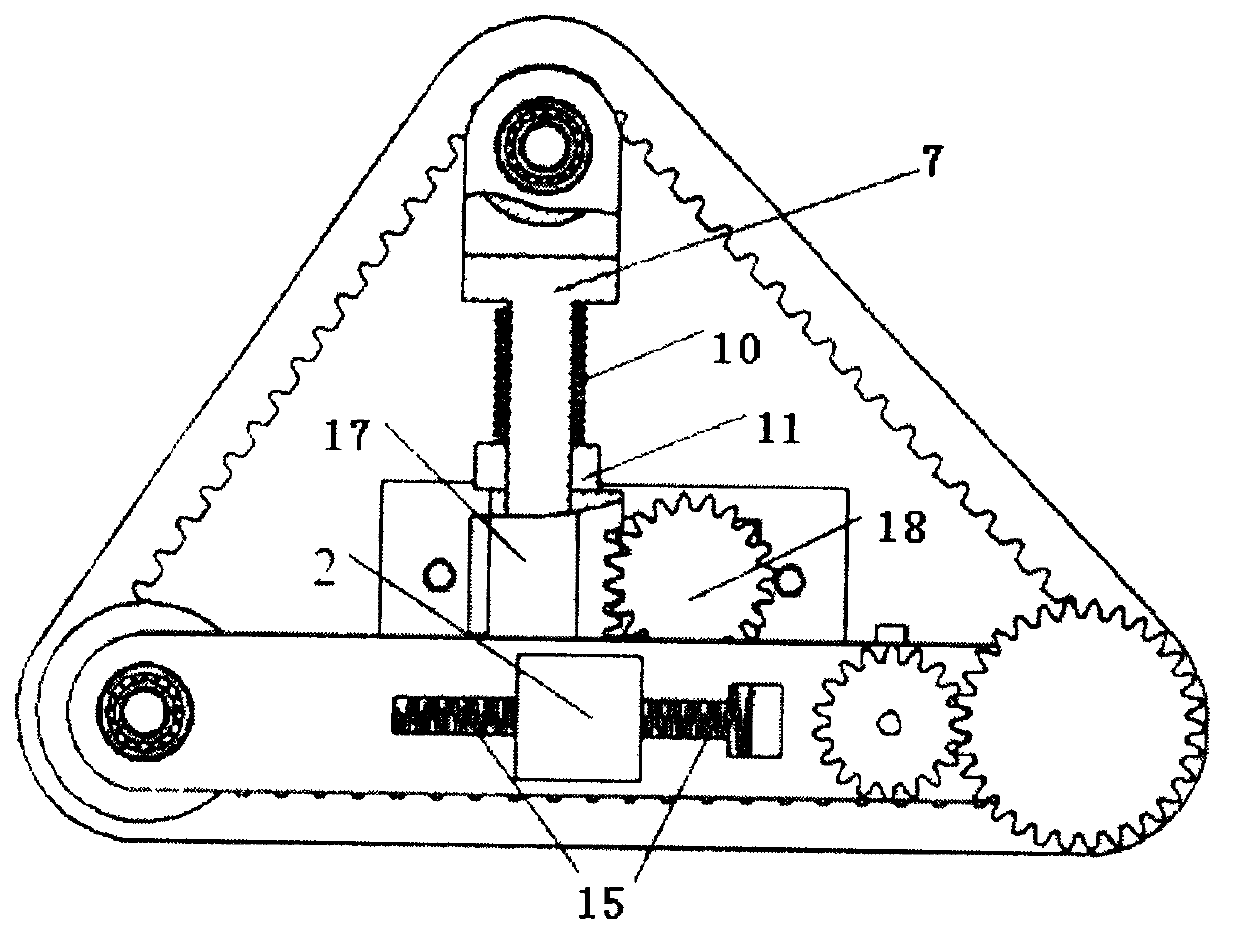
[0042] Such as Figure 2a , Figure 2b and Figure 2c As shown, the sleeve 17 is a lifting sleeve arranged on the upper surface of the fuselage frame 1, the outer surface of the lifting sleeve is provided with a rack, and the fuselage frame 1 is provided with a connecting tensioning sleeve. The driving gear 18 of the motor 19, the driving gear 18 meshes with the rack of the lifting sleeve and drives the lifting sleeve to go up and down.
[0043] image 3 Shown is a schematic view of the second embodiment of the adhesive running gear traveling on a flat surface. The robot body outputs rotation and translation motions in the x-y plane to the adhesive walking mechanism by controlling the lateral slider 2; the robot body first outputs rotational motion so that the line connecting the main and follower wheels of the adhesive walking mechanism and the wall forms a certain angle α (position posture angle). The DC motor 3 rotates to drive the adhesion mechanism and the body to ad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More