

Method and device for planning spatial motion of intelligent arm
A space motion and smart arm technology, applied in the field of smart arm control, can solve problems such as complex motion planning, no consideration of turntable automatic control, and reduced actual performance of the smart arm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
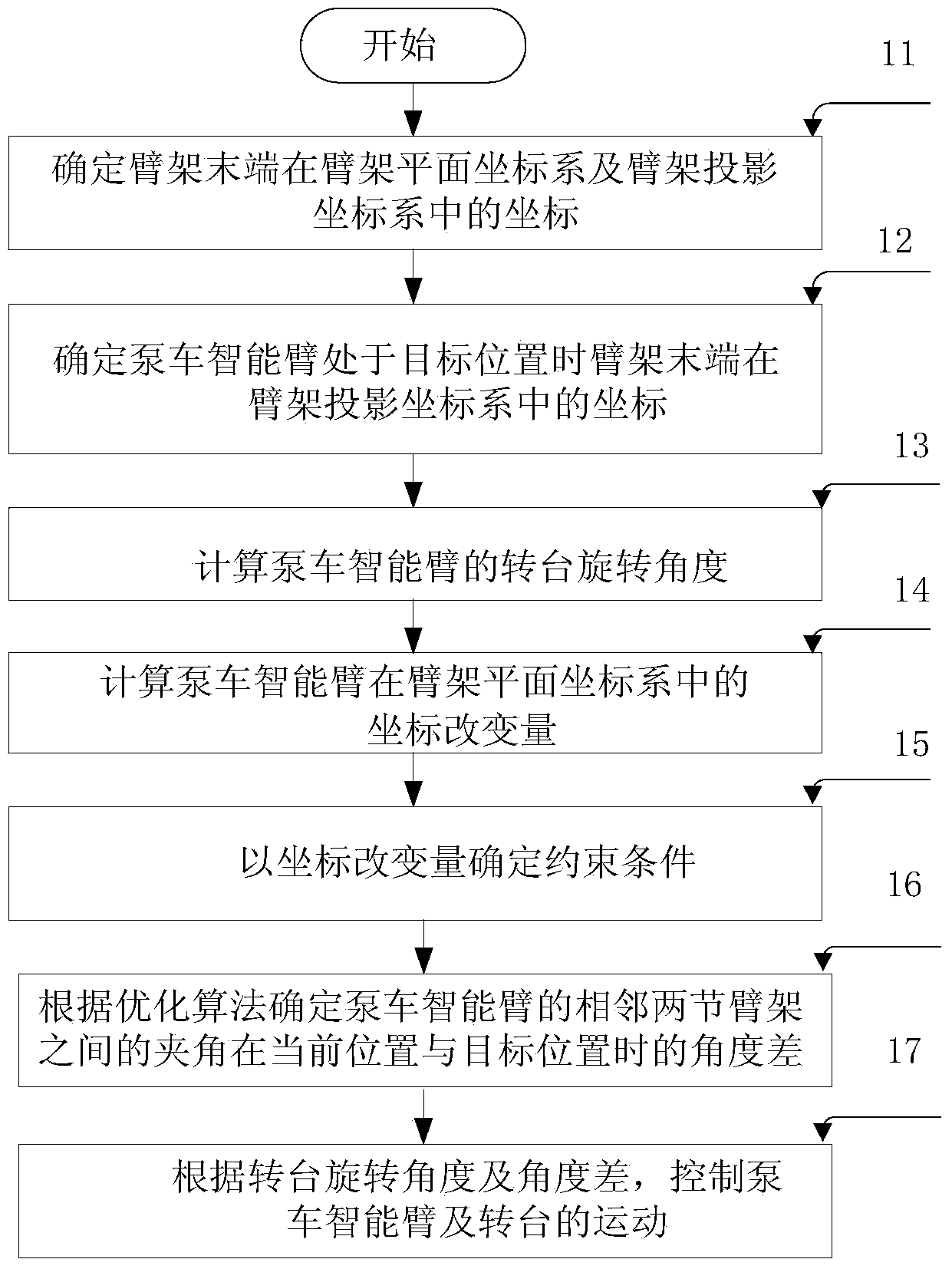
[0044] figure 2 It is a flow chart of the intelligent arm space motion planning method provided by the embodiment of the present invention, the intelligent arm space motion planning method is applied to the intelligent arm with n-section arms, wherein n is greater than or equal to 2; figure 2 As shown, the intelligent arm spatial motion planning method includes:
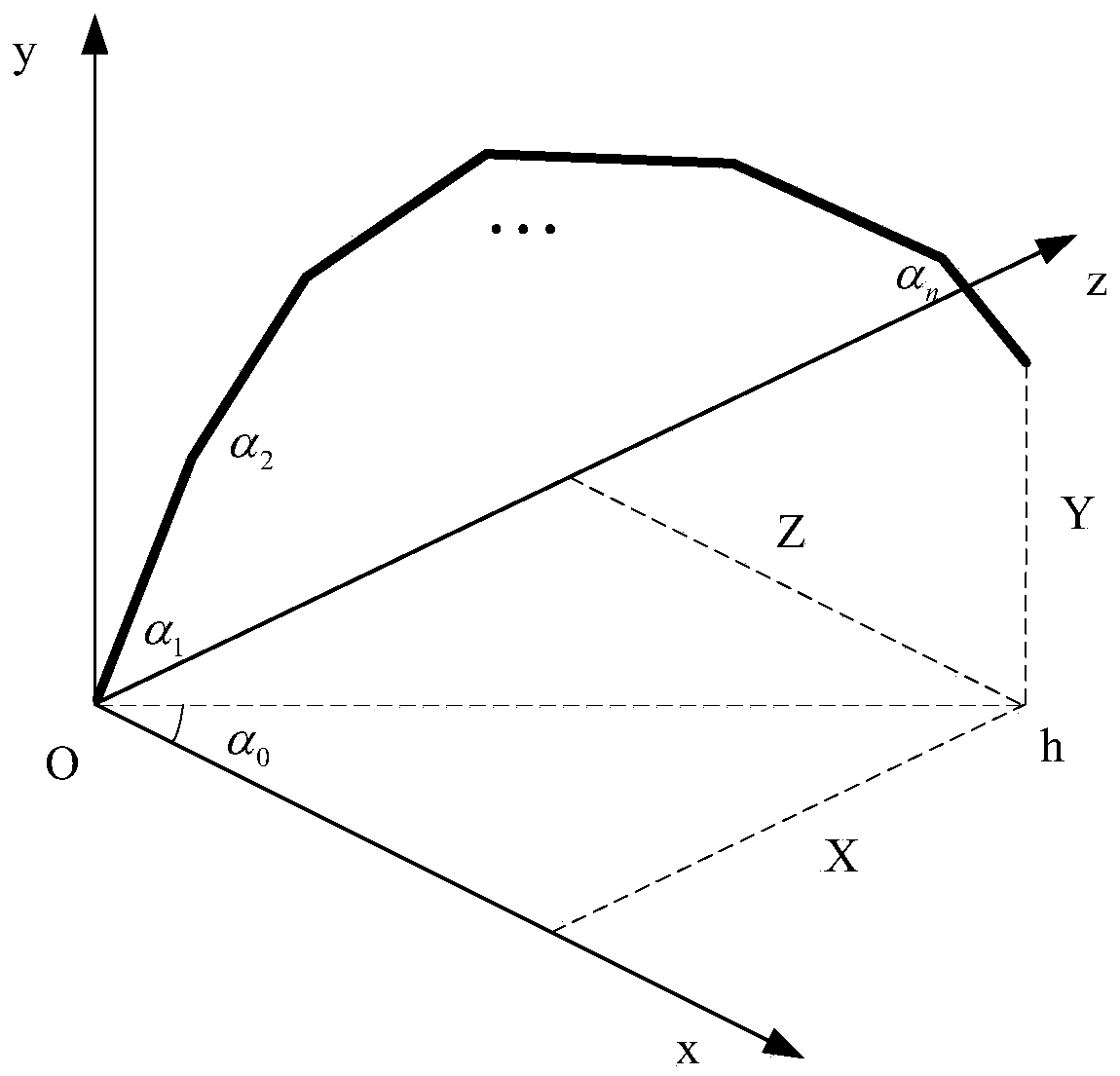
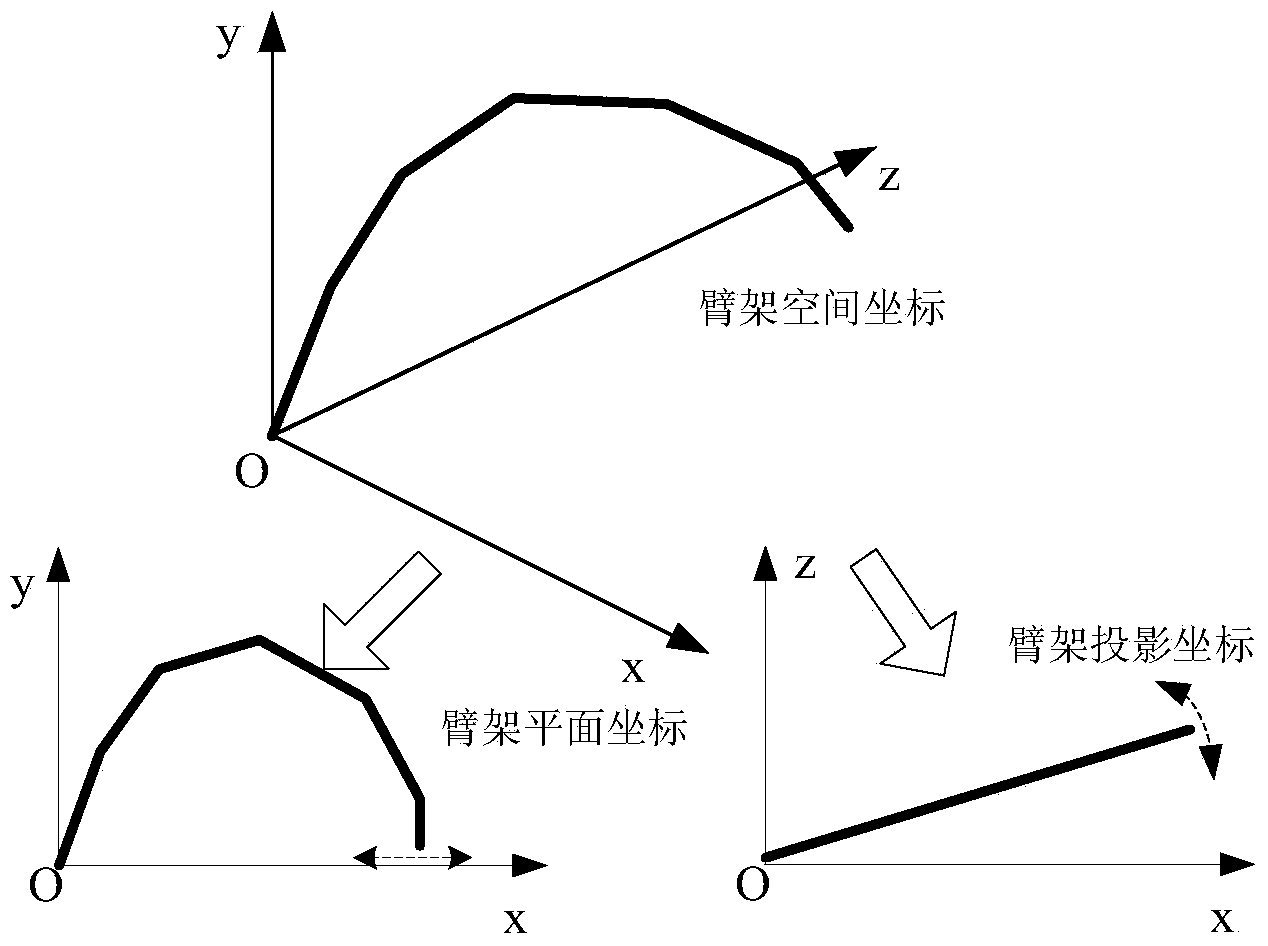
[0045] Step 11: According to the coordinates of the boom end in the boom space coordinate system when the smart arm is in the current position, determine the first coordinate of the boom end in the boom plane coordinate system and the first coordinate in the boom projection coordinate system Two coordinates;
[0046] Specific as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More