

Haptic rendering method based on texture image
A technology of tactile reproduction and texture image, applied in the field of image processing, it can solve the problems of inability to simulate texture contact, limited texture types, lack of realism, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
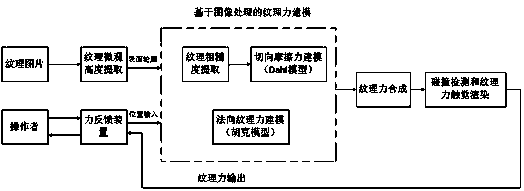
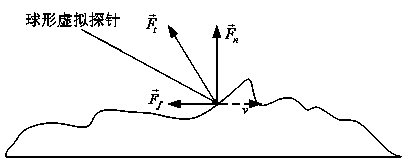
[0048] Such as figure 1 with figure 2 As shown, a kind of haptic reproduction method based on texture image of the present invention, the haptic reproduction method includes the following process:
[0049] Step 10) Extracting texture features, the texture features include the microscopic height of the texture surface and the dynamic friction coefficient representing the texture roughness;
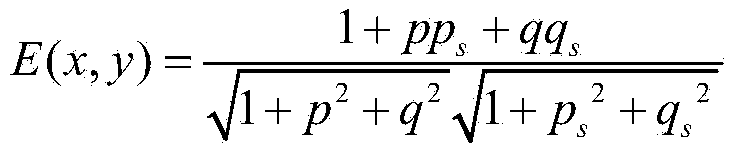
[0050] The microscopic height of the textured surface is extracted using a shape recovery method from shading. The specific process is as follows: first, according to the method of recovering shape from light and shade, assuming that the light source is a point light source at infinity, the reflection model is a Lambertian reflection model, and the imaging geometric relationship is an orthogonal projection, the texture shown in formula (1) is establ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More